






ສູນເຄື່ອງຈັກແນວຕັ້ງ 5 ແກນ V5-320B

1. ການຈັດວາງໂດຍລວມຂອງເຄື່ອງມືເຄື່ອງຈັກ
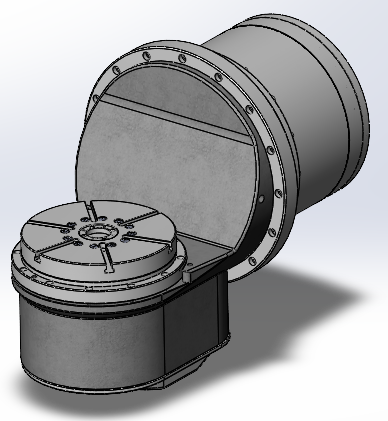
ສູນເຄື່ອງຈັກຫ້າແກນ V5-320B ຮັບຮອງເອົາໂຄງສ້າງທີ່ມີຮູບຊົງ C ທີ່ຫມັ້ນຄົງ, ຖັນຖືກສ້ອມແຊມຢູ່ເທິງຕຽງ, ແຜ່ນສະໄລ້ເລື່ອນຕາມແນວນອນຕາມຖັນ (ທິດທາງ X), ບ່ອນນັ່ງສະໄລ້ເລື່ອນຕາມລວງຍາວຕາມແຜ່ນສະໄລ້ (ທິດທາງ Y. ), ແລະ headstock ຍ້າຍຕາມແນວຕັ້ງຕາມບ່ອນນັ່ງສະໄລ້ (ທິດທາງ Z). ຕາຕະລາງເຮັດວຽກຮັບຮອງເອົາໂຄງສ້າງ cradle ແຂນດຽວທີ່ພັດທະນາດ້ວຍຕົນເອງ, ແລະຕົວຊີ້ວັດການປະຕິບັດຕ່າງໆຂອງມັນໄດ້ບັນລຸລະດັບກ້າວຫນ້າສາກົນ.
2. ລະບົບອາຫານ
X, Y, Z-axis guide rails and ball screws, small dynamic and static friction, sensitivity high, small high-speed vibration, not creeping at low speed, high positioning precision, and excellent servo drive performance.
X, Y, Z-axis servo motors ແມ່ນເຊື່ອມຕໍ່ໂດຍກົງກັບ screws ບານທີ່ມີຄວາມແມ່ນຍໍາສູງໂດຍ couplings, ຫຼຸດຜ່ອນການເຊື່ອມຕໍ່ລະຫວ່າງກາງ, realizing gapless ລະບົບສາຍສົ່ງ, ການໃຫ້ອາຫານທີ່ມີຄວາມຍືດຫຍຸ່ນ, ຕໍາແຫນ່ງທີ່ຖືກຕ້ອງ, ແລະຄວາມແມ່ນຍໍາຂອງສາຍສົ່ງສູງ.
ມໍເຕີ servo ແກນ Z ມີຫນ້າທີ່ຫ້າມລໍ້. ໃນກໍລະນີທີ່ມີການຂັດຂ້ອງຂອງພະລັງງານ, ເບກສາມາດຈັບແກນມໍເຕີຢ່າງແຫນ້ນແຫນ້ນເພື່ອບໍ່ໃຫ້ຫມຸນ, ເຊິ່ງມີບົດບາດໃນການປົກປ້ອງຄວາມປອດໄພ.
3. spindle ໄຟຟ້າ
spindle ໄຟຟ້າຮັບຮອງເອົາ spindle ໄຟຟ້າທີ່ມີປະສິດຕິພາບສູງທີ່ພັດທະນາຕົນເອງ (ສິດທິບັດ invention: 202010130049.4), ແລະໃນຕອນທ້າຍແມ່ນມີເຄື່ອງເຮັດຄວາມເຢັນ nozzles ເພື່ອເຮັດໃຫ້ເຄື່ອງເຢັນ. ມັນມີຄວາມໄດ້ປຽບຂອງຄວາມໄວສູງ, ຄວາມແມ່ນຍໍາສູງ, ແລະການຕອບສະຫນອງແບບເຄື່ອນໄຫວສູງ, ແລະສາມາດຮັບຮູ້ລະບຽບການຄວາມໄວ stepless. ຕົວເຂົ້າລະຫັດຄວາມແມ່ນຍໍາສູງໃນຕົວສາມາດຮັບຮູ້ການຢຸດທີ່ຖືກຕ້ອງຕາມທິດທາງ ແລະ ການແຕະທີ່ເຄັ່ງຄັດ.

4. ວາລະສານເຄື່ອງມື
ວາລະສານເຄື່ອງມືປະເພດແຜ່ນ BT40, 24 ຕໍາແຫນ່ງເຄື່ອງມື, ການປ່ຽນແປງເຄື່ອງມືອັດຕະໂນມັດໂດຍ ATC manipulator.
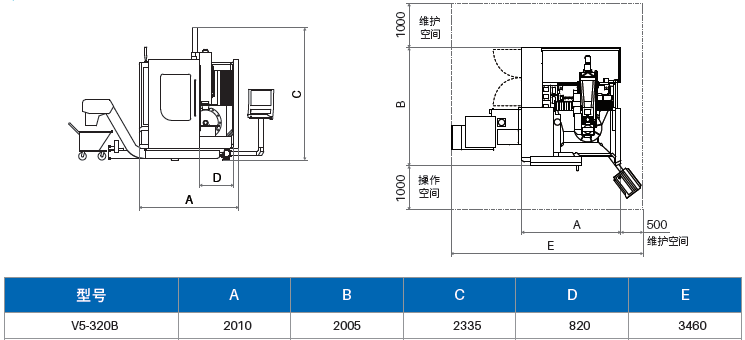
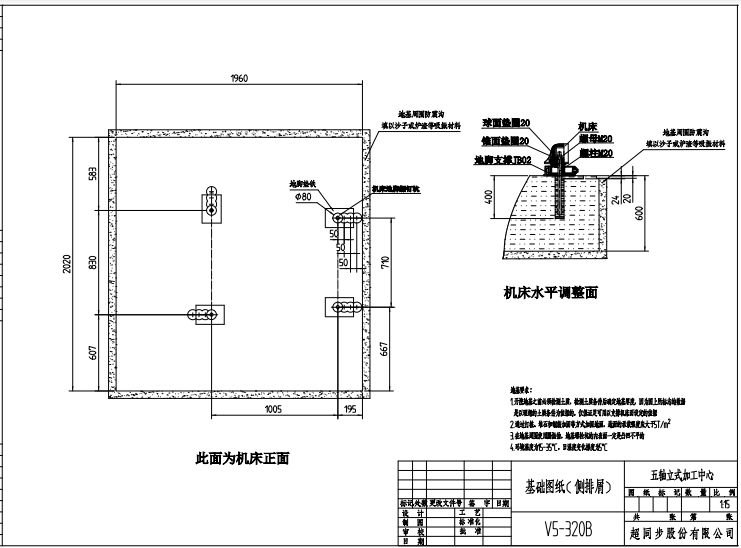
ເບິ່ງຂ້າງລຸ່ມນີ້:

5. ໂຕະໂຕະ
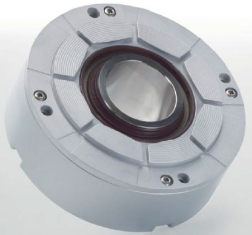
ມັນຮັບຮອງເອົາໂຄງສ້າງ cradle ແຂນດຽວທີ່ພັດທະນາດ້ວຍຕົນເອງ, ເຊິ່ງມີຂໍ້ດີຂອງຄວາມເຂັ້ມງວດສູງ, ຄວາມແມ່ນຍໍາສູງແລະການຕອບສະຫນອງແບບເຄື່ອນໄຫວສູງ.
| ແກນ | ໃຫ້ຄະແນນ Torque Nm | ອັດຕາຄວາມໄວ rpm | ສູງສຸດ. ຄວາມໄວ rpm | ອັນດັບປັດຈຸບັນ A | ການປະເມີນພະລັງງານ kW |
| B | 656 | 80 | 100 | 18 | 5.5 |
| C | ໑໗໒ | 100 | ໑໓໐ | 6.1 | 1.8 |
6. ລະບົບຄໍາຄຶດຄໍາເຫັນ loop ປິດຢ່າງເຕັມສ່ວນ
ແກນເສັ້ນ X, Y, ແລະ Z ແມ່ນອຸປະກອນທີ່ມີ HEIDENHAIN LC4 ຊຸດຄ່າ grating ມູນຄ່າຢ່າງແທ້ຈິງ; ຕາຕະລາງ rotary B ແລະ C ແມ່ນຕິດຕັ້ງດ້ວຍຕົວເຂົ້າລະຫັດມຸມມູນຄ່າຢ່າງແທ້ຈິງຊຸດ HEIDENHAIN RCN2000 ເພື່ອຮັບຮູ້ຄໍາຕິຊົມຂອງວົງປິດເຕັມຂອງ 5 ແກນອາຫານ, ຮັບປະກັນວ່າເຄື່ອງມືເຄື່ອງຈັກມີຄວາມແມ່ນຍໍາແລະຄວາມແມ່ນຍໍາສູງ. ການຮັກສາຄວາມຖືກຕ້ອງ.

7. ລະບົບລະບາຍຄວາມຮ້ອນ ແລະ ນິວເມຕິກ
ມີເຄື່ອງເຮັດຄວາມເຢັນນ້ໍາສໍາລັບຄວາມເຢັນຂອງອຸນຫະພູມຄົງທີ່ເພື່ອຮັບປະກັນວ່າ spindle ໄຟຟ້າແລະ turntable ໄດໂດຍກົງຢູ່ໃນສະພາບການເຮັດວຽກທີ່ດີແລະສາມາດເຮັດວຽກໄດ້ຢ່າງມີປະສິດທິພາບເປັນເວລາດົນນານ.
ລະບົບ pneumatic ໄດ້ຖືກກັ່ນຕອງໂດຍອົງປະກອບ pneumatic ເພື່ອຮັບຮູ້ຫນ້າທີ່ທໍາຄວາມສະອາດແລະເປົ່າຮູ taper ຂອງ shaft ຕົ້ນຕໍ, ການປ້ອງກັນການປະທັບຕາທາງອາກາດຂອງ bearing shaft ຕົ້ນຕໍ, ແລະການຫັນກັບຄືນໄປບ່ອນຂອງວາລະສານເຄື່ອງມືແລະຜູ້ຖືເຄື່ອງມື.
8. ລະບົບການຫລໍ່ລື່ນສູນກາງ
ແຖບເລື່ອນຂອງທາງລົດໄຟຄູ່ມືແລະຫມາກແຫ້ງເປືອກແຂງຂອງ screw ບານຮັບຮອງເອົາອຸປະກອນ lubricating ສູນກາງທີ່ມີ grease ບາງ, ເຊິ່ງສະຫນອງການ lubrication ປົກກະຕິແລະປະລິມານເພື່ອຮັບປະກັນຄວາມຖືກຕ້ອງແລະຄວາມຫມັ້ນຄົງຂອງບານ screw ແລະ rail ຄູ່ມື.
9. ລະບົບການວັດແທກ workpiece
ເຄື່ອງມືເຄື່ອງຈັກໄດ້ຖືກຕິດຕັ້ງດ້ວຍ HEIDENHAIN TS460 touch probe ແລະເຄື່ອງຮັບສັນຍານໄຮ້ສາຍ, ເຊິ່ງສາມາດໄດ້ຮັບການຕິດຕັ້ງຢູ່ໃນ spindle ໄດ້ໂດຍຜ່ານລະບົບການປ່ຽນເຄື່ອງມືຄູ່ມືຫຼືອັດຕະໂນມັດເພື່ອຮັບຮູ້ຫນ້າທີ່ຂອງການຈັດຕໍາແຫນ່ງ workpiece, ການວັດແທກ workpiece ແລະກໍານົດຈຸດ preset, ແລະການເຮັດເລື້ມຄືນການວັດແທກແມ່ນ ≤ 1um (ຄວາມໄວ probing 1 m / min), ອຸນຫະພູມການເຮັດວຽກແມ່ນ 10 ° C ຫາ 40 ° C. ເຄື່ອງສໍາຜັດ HEIDENHAIN ຖືກກະຕຸ້ນໂດຍສະວິດ optical. stylus ໃຊ້ສາມຈຸດ bearing ເພື່ອຮັບປະກັນຕໍາແຫນ່ງຟຣີຂອງລັດທີ່ເຫມາະສົມ. ມັນບໍ່ສວມໃສ່ໃນລະຫວ່າງການນໍາໃຊ້, ມີຄວາມສອດຄ່ອງແລະມີຄວາມຫມັ້ນຄົງໃນເວລາດົນນານ.


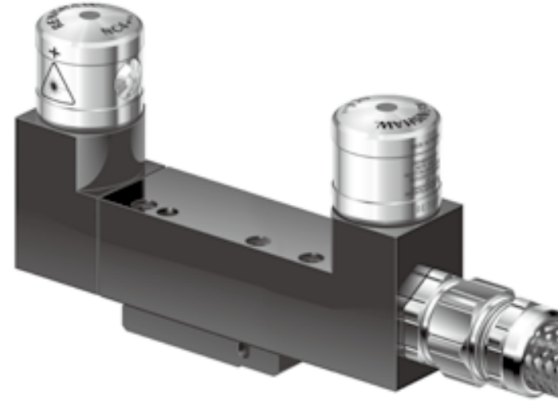
10. ລະບົບການວັດແທກເຄື່ອງມື
ເຄື່ອງມືເຄື່ອງແມ່ນມີເຄື່ອງມືການຕັ້ງຄ່າ Renishaw NC4 laser ເຄື່ອງມື, ຄວາມສາມາດເຮັດເລື້ມຄືນຂອງການວັດແທກແມ່ນ ± 0.1um, ແລະອຸນຫະພູມການເຮັດວຽກແມ່ນ 5°C ກັບ 50°C.
11. ການປັບຄວາມແມ່ນຍໍາຫ້າແກນ
ເຄື່ອງມືເຄື່ອງຈັກໄດ້ຖືກຕິດຕັ້ງດ້ວຍບານປັບ KKH ຈາກ HEIDENHAIN, ພ້ອມກັບ TS series probes, ເພື່ອບັນລຸການປັບຕົວທີ່ຊັດເຈນຂອງແກນຫມຸນຂອງເຄື່ອງຈັກ, ຫຼຸດຜ່ອນຄວາມຜິດພາດໃນລະຫວ່າງການເຄື່ອນທີ່ຂອງເຄື່ອງມືເຄື່ອງຈັກ, ແລະບັນລຸຄວາມແມ່ນຍໍາສູງແລະເຮັດຊ້ໍາອີກ.

12. ການປົກປ້ອງເຄື່ອງມືເຄື່ອງຈັກ
ເຄື່ອງມືຂອງເຄື່ອງຈັກໄດ້ຮັບຮອງເອົາການປົກຫຸ້ມຂອງການປ້ອງກັນທີ່ສອດຄ່ອງກັບມາດຕະຖານຄວາມປອດໄພເພື່ອປ້ອງກັນບໍ່ໃຫ້ coolant ແລະ chips ຈາກການ splashing, ຮັບປະກັນການດໍາເນີນງານທີ່ປອດໄພ, ແລະມີລັກສະນະທີ່ຫນ້າພໍໃຈ. ທິດທາງ X ຂອງເຄື່ອງມືເຄື່ອງຈັກແມ່ນອຸປະກອນທີ່ມີໄສ້ປະຈໍາຕະກູນ, ເຊິ່ງສາມາດປ້ອງກັນທາງລົດໄຟຄູ່ມືແລະບານສະກູຢ່າງມີປະສິດທິພາບ.
13. ເງື່ອນໄຂການເຮັດວຽກຂອງເຄື່ອງມືເຄື່ອງຈັກ
(1) ການສະຫນອງພະລັງງານ: 380V ± 10% 50HZ± 1HZ ສາມເຟດ AC
(2) ອຸນຫະພູມລ້ອມຮອບ: 5°C-40°C
(3) ອຸນຫະພູມທີ່ດີທີ່ສຸດ: 22°C-24°C
(4) ຄວາມຊຸ່ມຊື່ນພີ່ນ້ອງ: 20-75%
(5) ຄວາມກົດດັນແຫຼ່ງອາກາດ: ≥6 bar
(6) ອັດຕາການໄຫຼຂອງແຫຼ່ງອາຍແກັສ: 500 ລິດ/ນາທີ
14. ການແນະນໍາການເຮັດວຽກຂອງລະບົບ CNC

ລະບົບ CNC HEIDENHAIN TNC640
(1) ຈໍານວນແກນ: ເຖິງ 24 loops ຄວບຄຸມ
(2) ຮຸ່ນຫນ້າຈໍສໍາຜັດກັບການດໍາເນີນງານຫຼາຍສໍາພັດ
(3) ການປ້ອນຂໍ້ມູນໂຄງການ: ການຂຽນໂປຼແກຼມສົນທະນາ Klartext ແລະລະຫັດ G (ISO).
(4) ການດໍາເນີນໂຄງການ contour ຟຣີ FK: ການນໍາໃຊ້ພາສາການສົນທະນາ Klartext ເພື່ອດໍາເນີນການໂຄງການ contour ຟຣີ FK ທີ່ມີສະຫນັບສະຫນູນຮູບພາບ
(5) ຮອບວຽນການຂຸດແລະເຈາະທີ່ອຸດົມສົມບູນ
(6) ການຊົດເຊີຍເຄື່ອງມື: ການຊົດເຊີຍ radius ເຄື່ອງມືແລະການຊົດເຊີຍຄວາມຍາວຂອງເຄື່ອງມື. ຮອບວຽນສອບ
(7) ການຕັດຂໍ້ມູນ: ການຄິດໄລ່ອັດຕະໂນມັດຂອງຄວາມໄວ spindle, ຄວາມໄວການຕັດ, ອາຫານຕໍ່ແຜ່ນໃບຄ້າຍຄືແລະອາຫານຕໍ່ວົງ.
(8) ຄວາມໄວການປຸງແຕ່ງ contour ຄົງທີ່: ພີ່ນ້ອງກັບເສັ້ນທາງຂອງສູນເຄື່ອງມື / ພີ່ນ້ອງກັບແຂບເຄື່ອງມື
(9) Parallel Run: ໂປຣແກຣມທີ່ຮອງຮັບກຣາບຟິກ ໃນຂະນະທີ່ໂປຣແກຣມອື່ນກຳລັງແລ່ນຢູ່
(10) ອົງປະກອບ Contour: ເສັ້ນຊື່ / chamfer / arc ເສັ້ນທາງ / ສູນກາງວົງ / radius ວົງ / tangentially ເຊື່ອມຕໍ່ arc / ມຸມມົນ
(11) ເຂົ້າໄປໃກ້ ແລະ ອອກຈາກຮູບຊົງ: tangential ຫຼື perpendicular / ຜ່ານເສັ້ນທາງ arc
(12) ການກະໂດດຂອງໂປຣແກຣມ: ໂປຣແກມຍ່ອຍ/ໂປຣແກມບຼັອກເຮັດຊ້ຳ/ໂປຣແກມໃດນຶ່ງສາມາດເປັນໂປຣແກມຍ່ອຍໄດ້
(13) ວົງຈອນກະປ໋ອງ: ການເຈາະ, ການປາດຢາງ (ມີຫຼືບໍ່ມີກອບການປາດຢາງທີ່ເລື່ອນໄດ້), ຮູບສີ່ຫລ່ຽມແລະໂຄ້ງໂຄ້ງ. Peck ເຈາະ, reaming, ເຈາະ, ຈຸດປະເຊີນຫນ້າ, ຈຸດເຈາະ. Milling ກະທູ້ພາຍໃນແລະພາຍນອກ. ຮອຍແປ້ວຂອງພື້ນຜິວແປ ແລະ inclined. ສໍາເລັດການເຄື່ອງຈັກຂອງກະເປົ໋າຮູບສີ່ຫລ່ຽມແລະວົງ, ນາຍຈ້າງຮູບສີ່ຫລ່ຽມແລະວົງ. ຮອບວຽນ roughing ແລະສໍາເລັດຮູບສໍາລັບ grooves ຊື່ແລະວົງ. ຈຸດ Array ໃນວົງມົນແລະເສັ້ນ. ຈຸດ Array: ລະຫັດ QR. ຕ່ອງໂສ້ Contour, ຖົງ Contour. Contour groove ສໍາລັບ trochoidal milling. ວົງຈອນການແກະສະຫຼັກ: ແກະສະຫຼັກຂໍ້ຄວາມ ຫຼືຕົວເລກຕາມເສັ້ນຊື່ ຫຼືເສັ້ນໂຄ້ງ.
(14) ການປ່ຽນແປງປະສານງານ: ການແປພາສາ, rotation, mirroring, scaling (ແກນສະເພາະ).
(15) Q parameter variable programming: ຟັງຊັນທາງຄະນິດສາດ, ການດໍາເນີນງານຕາມເຫດຜົນ, ການດໍາເນີນງານວົງເລັບ, ຄ່າຢ່າງແທ້ຈິງ, ຄົງທີ່ þ, negation, integer ຫຼື decimal, ຟັງຊັນການຄິດໄລ່ວົງມົນ, ຟັງຊັນການປະມວນຜົນຂໍ້ຄວາມ.
(16) Programming aids: ເຄື່ອງຄິດເລກ. ບັນຊີລາຍຊື່ຂອງຂໍ້ຄວາມສະແດງຂໍ້ຜິດພາດໃນປະຈຸບັນທັງຫມົດ. ຟັງຊັນການຊ່ວຍເຫຼືອທີ່ລະອຽດອ່ອນກັບບໍລິບົດສໍາລັບຂໍ້ຄວາມສະແດງຂໍ້ຜິດພາດ. TNCguide: ລະບົບການຊ່ວຍເຫຼືອແບບປະສົມປະສານ; TNC 640 ສະແດງຂໍ້ມູນໂດຍກົງຈາກຄູ່ມືຜູ້ໃຊ້. ສະຫນັບສະຫນູນຮູບພາບສໍາລັບການດໍາເນີນໂຄງການວົງຈອນ. ບລັອກຄໍາເຫັນແລະບລັອກຕົ້ນຕໍໃນໂຄງການ NC.
(17) ການໄດ້ມາຂໍ້ມູນຂ່າວສານ: ໂດຍກົງນໍາໃຊ້ຕໍາແຫນ່ງຕົວຈິງໃນໂຄງການ NC.
(18) ກຣາບຟິກການກວດສອບໂປຣແກຣມ: ການຈຳລອງກາຟິກຂອງການເຮັດວຽກຂອງເຄື່ອງຈັກສາມາດປະຕິບັດໄດ້ເຖິງແມ່ນວ່າໂປຣແກຣມອື່ນກຳລັງເຮັດວຽກຢູ່ກໍຕາມ. ມຸມເບິ່ງເທິງສຸດ / ມຸມເບິ່ງສາມມິຕິ / ສະເຕຣິໂອ, ແລະຍົນປະມວນຜົນ inclined / ການແຕ້ມເສັ້ນ 3-D. ການຂະຫຍາຍຕົວທ້ອງຖິ່ນ.
(19) ສະຫນັບສະຫນູນກາຟິກການຂຽນໂປຼແກຼມ: ເຖິງແມ່ນວ່າໂຄງການອື່ນກໍາລັງເຮັດວຽກຢູ່, ຮູບພາບ (ແຜນວາດການຕິດຕາມການຂຽນດ້ວຍມື 2-D) ຂອງພາກສ່ວນໂຄງການ NC ສາມາດຖືກສະແດງຢູ່ໃນຮູບແບບການດໍາເນີນງານການແກ້ໄຂໂປຼແກຼມ.
(20) ໂປລແກລມແລ່ນກາຟິກ: ການຈຳລອງກາຟິກແບບສົດໆ ໃນຂະນະທີ່ປະຕິບັດໂຄງການ milling. ມຸມເບິ່ງເທິງ / ສາມມຸມເບິ່ງ / ສະເຕຣິໂອ.
(21) ເວລາປະມວນຜົນ: ຄິດໄລ່ເວລາປະມວນຜົນໃນໂຫມດປະຕິບັດງານ "ແລ່ນທົດສອບ". ສະແດງໃຫ້ເຫັນເວລາໃນປັດຈຸບັນເຄື່ອງຈັກໃນ "ການດໍາເນີນງານໂຄງການ" ຮູບແບບການປະຕິບັດ.
(22) ກັບຄືນໄປຫາ contour: ສະແດງເວລາປະມວນຜົນໃນປະຈຸບັນຢູ່ໃນຮູບແບບການດໍາເນີນງານ "ດໍາເນີນໂຄງການ". ການຂັດຂວາງໂຄງການ, ອອກແລະກັບຄືນໄປຫາ contour.
(23) ການຄຸ້ມຄອງຈຸດທີ່ຕັ້ງໄວ້ລ່ວງຫນ້າ: ຕາຕະລາງສໍາລັບການປະຢັດຈຸດທີ່ຕັ້ງໄວ້ກ່ອນໃດຫນຶ່ງ.
(24) ຕາຕະລາງຕົ້ນກໍາເນີດ: ຕາຕະລາງຕົ້ນກໍາເນີດຫຼາຍ, ນໍາໃຊ້ເພື່ອຊ່ວຍປະຢັດຕົ້ນກໍາເນີດທີ່ກ່ຽວຂ້ອງຂອງ workpiece ໄດ້.
(25) 3-D Machining: ການຄວບຄຸມການເຄື່ອນໄຫວຂອງຄຸນນະພາບສູງ Smooth Jerk
(26) ເວລາປະມວນຜົນ: 0.5 ms
(27) ຄວາມລະອຽດການປ້ອນຂໍ້ມູນແລະການສະແດງຂັ້ນຕອນ: 0.1 μm
(28) ຮອບວຽນການວັດແທກ: ການສອບທຽບ probe. ຄູ່ມືຫຼືອັດຕະໂນມັດການຊົດເຊີຍຂອງ misalignment workpiece. ຕັ້ງຈຸດທີ່ຕັ້ງໄວ້ລ່ວງໜ້າດ້ວຍຕົນເອງ ຫຼືອັດຕະໂນມັດ. ເຄື່ອງມືແລະ workpiece ສາມາດວັດແທກອັດຕະໂນມັດ.
(29) ການຊົດເຊີຍຄວາມຜິດພາດ: ຄວາມຜິດພາດຂອງແກນ linear ແລະ nonlinear, backlash, ມຸມແຫຼມ reverse ຂອງການເຄື່ອນໄຫວວົງ, ຄວາມຜິດພາດປີ້ນກັບກັນ, ການຂະຫຍາຍຄວາມຮ້ອນ. friction static, sliding friction.
(30) ການໂຕ້ຕອບຂໍ້ມູນ: RS-232-C/V.24, ສູງສຸດ 115 kbit/s. ສ່ວນຕິດຕໍ່ຂໍ້ມູນຂະຫຍາຍຂອງໂປໂຕຄອນ LSV2, ໃຊ້ຊອບແວ HEIDENHAIN TNCremo ຫຼື TNCremoPlus ເພື່ອດໍາເນີນການ TNC ຈາກໄລຍະໄກຜ່ານສ່ວນຕິດຕໍ່ຂໍ້ມູນນີ້. 2 x Gigabit Ethernet 1000BASE-T ການໂຕ້ຕອບ. 5 x ຜອດ USB (1 ພອດ USB 2.0 ດ້ານໜ້າ, 4 ພອດ USB 3.0).
(31) ການວິນິດໄສ: ເຄື່ອງມືການວິນິດໄສດ້ວຍຕົນເອງສໍາລັບການແກ້ໄຂບັນຫາໄວແລະສະດວກ.
(32) CAD reader: ສະແດງໄຟລ໌ຮູບແບບ CAD ມາດຕະຖານ.
ຕົວກໍານົດການຕົ້ນຕໍ
| ລາຍການ | ໜ່ວຍ | ພາລາມິເຕີ | |
| ໂຕະເຮັດວຽກ | ເສັ້ນຜ່າສູນກາງຕາຕະລາງເຮັດວຽກ | mm | 320 |
| ການໂຫຼດຕາມລວງນອນສູງສຸດ | kg | 150 | |
| ໂຫຼດແນວຕັ້ງສູງສຸດ | kg | 100 | |
| T-slot | mm | 8X10H8 | |
| ໄລຍະການປະມວນຜົນ | ໄລຍະຫ່າງລະຫວ່າງໜ້າປາຍ spindle ແລະໜ້າທ້າຍໂຕະເຮັດວຽກ (ສູງສຸດ) | mm | 430 |
| ໄລຍະຫ່າງລະຫວ່າງຫນ້າປາຍ spindle ແລະຫນ້າສິ້ນຂອງຕາຕະລາງເຮັດວຽກ (ນາທີ) | mm | 100 | |
| ແກນ X | mm | 450 | |
| ແກນ Y | mm | 320 | |
| ແກນ Z | mm | 330 | |
| B ແກນ | ° | -35°~+ 110° | |
| ແກນ C | ° | 360° | |
| spindle | Taper(7 ∶ 24) |
| BT40 |
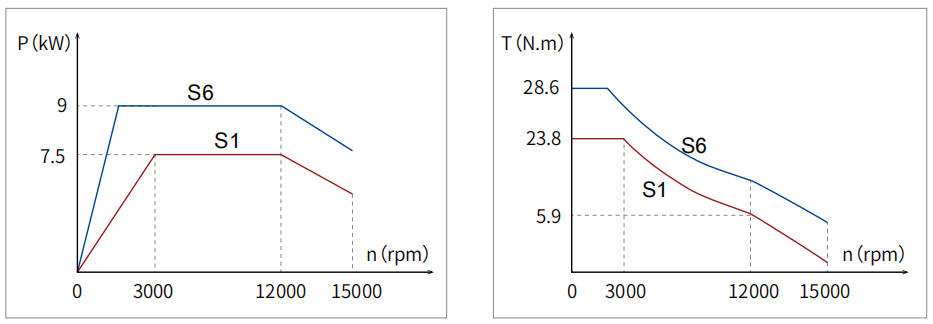
| ຄວາມໄວຄະແນນ | rpm | 3000 | |
| ສູງສຸດ. ຄວາມໄວ | rpm | 15000 | |
| ແຮງບິດ S1 | ນທ | 23.8 | |
| ລະດັບພະລັງງານ S1 | KW | 7.5 | |
|
ແກນ | X axis ຄວາມໄວຂ້າມຢ່າງໄວວາ | m/ນທ | 36 |
| ແກນ Y ຄວາມໄວຂ້າມຢ່າງໄວວາ | m/ນທ | 36 | |
| Z axis ຄວາມໄວຂ້າມຢ່າງໄວວາ | m/ນທ | 36 | |
| ແກນ B ສູງສຸດ. ຄວາມໄວ | rpm | ໑໓໐ | |
| ແກນ C ສູງສຸດ. ຄວາມໄວ | rpm | ໑໓໐ | |
| ວາລະສານເຄື່ອງມື | ປະເພດ |
| ປະເພດແຜ່ນ |
| ວິທີການເລືອກເຄື່ອງມື |
| ການເລືອກເຄື່ອງມືທີ່ໃກ້ທີ່ສຸດ bidirectional | |
| ຄວາມອາດສາມາດ | T | 24 | |
| ສູງສຸດ. ຄວາມຍາວຂອງເຄື່ອງມື | mm | 150 | |
| ສູງສຸດ. ນ້ໍາຫນັກເຄື່ອງມື | kg | 7 | |
| ສູງສຸດ. ເສັ້ນຜ່າສູນກາງແຜ່ນຕັດ (ເຄື່ອງມືເຕັມ) | mm | 80 | |
| ເສັ້ນຜ່າສູນກາງແຜ່ນຕັດສູງສຸດ (ເຄື່ອງມືຫວ່າງຢູ່ຕິດກັນ) | mm | 150 | |
| ຄວາມຖືກຕ້ອງ | ມາດຕະຖານບໍລິຫານ |
| GB/T20957.4 (ISO10791-4) |
| ຄວາມຖືກຕ້ອງຂອງການຈັດວາງແກນ X-axis/Y-axis/Z-axis | mm | 0.008/0.008/0.008 | |
| ຄວາມຖືກຕ້ອງຂອງການຈັດຕຳແໜ່ງແກນ B/C |
| 7”/7” | |
| ຄວາມຖືກຕ້ອງຂອງການຈັດຕຳແໜ່ງຂອງແກນ X-axis/Y-axis/Z-axis | mm | 0.006/0.006/0.006 | |
| ຄວາມຖືກຕ້ອງຂອງການຈັດຕຳແໜ່ງຄືນໃໝ່ຂອງແກນ B/ແກນ C |
| 5”/5” | |
| ນ້ຳໜັກເຄື່ອງ | Kg | 5000 | |
| ຄວາມອາດສາມາດໄຟຟ້າທັງຫມົດ | KVA | 45 | |
ບັນຊີລາຍຊື່ການຕັ້ງຄ່າມາດຕະຖານ
| ບໍ່. | ຊື່ |
| 1 | ອົງປະກອບຕົ້ນຕໍ (ລວມທັງຕຽງ, ຖັນ, ແຜ່ນສະໄລ້, ບ່ອນນັ່ງສະໄລ້, headstock) |
| 2 | ລະບົບອາຫານສາມແກນ X, Y, Z |
| 3 | ໂຕະຕັ້ງໂຕະແຂນດຽວ |
| 4 | spindle ໄຟຟ້າ BT40 |
| 5 | ລະບົບການຄວບຄຸມໄຟຟ້າ (ລວມທັງຕູ້ໄຟຟ້າ, ໂມດູນການສະຫນອງພະລັງງານ, ໂມດູນ servo, PLC, ແຜງປະຕິບັດງານ, ຈໍສະແດງຜົນ, ຫນ່ວຍບໍລິການມືຖື, ເຄື່ອງປັບອາກາດຕູ້ໄຟຟ້າ, ແລະອື່ນໆ) |
| 6 | ຂະຫນາດ Grating: HEIDENHAIN |
| 7 | ລະບົບໄຮໂດຼລິກ |
| 8 | ລະບົບນິວເມຕິກ |
| 9 | ລະບົບການຫລໍ່ລື່ນສູນກາງ |
| 10 | ທໍ່ລໍາລຽງຊິບ, ຖັງນໍ້າ, ເຄື່ອງເກັບຊິບ |
| 11 | ກອງລາງລົດໄຟ |
| 12 | ເຄື່ອງມືເຄື່ອງມືປົກປ້ອງໂດຍລວມ |
| 13 | ອຸປະກອນວັດແທກຊິ້ນວຽກ: HEIDENHAIN TS460 |
|
| ເກັດເສັ້ນຊື່ HEIDENHAIN |
| 14 | ເຄື່ອງມືການຕັ້ງຄ່າເຄື່ອງມື: HEIDENHAIN NC4 |
| 15 | ການປັບທຽບຄວາມແມ່ນຍໍາຫ້າແກນ: HEIDENHAIN KKH |
| 16 | ອີງຕາມຈຸດຫນຶ່ງຂອງການນໍາໃຊ້ຊອບແວຫຼັງການປຸງແຕ່ງ HPMILL, ຜູກມັດທີ່ຢູ່ທາງດ້ານຮ່າງກາຍຂອງຄອມພິວເຕີໄດ້ |
| 17 | ຟັງຊັນການຊົດເຊີຍການຍືດຕົວຄວາມຮ້ອນຂອງ spindle |






