ປະເພດ Gantry CNC ເຈາະແລະເຄື່ອງ Milling

CNC Gantry Milling ແລະເຄື່ອງເຈາະ
Gantry Drilling ແລະ Milling ເຄື່ອງ
ເຄື່ອງ CNC Gantry Milling
ຄໍາຮ້ອງສະຫມັກເຄື່ອງຈັກ
BOSM gantry ມືຖື CNC ເຄື່ອງເຈາະຄວາມໄວສູງແລະເຄື່ອງ milling ສ່ວນໃຫຍ່ແມ່ນໃຊ້ສໍາລັບການຂຸດເຈາະທີ່ມີປະສິດທິພາບສູງແລະການປຸງແຕ່ງແຜ່ນຂະຫນາດໃຫຍ່, flanges ພະລັງງານລົມ, ແຜ່ນ, ຊິ້ນສ່ວນແຫວນແລະຊິ້ນວຽກອື່ນໆທີ່ມີຄວາມຫນາພາຍໃນຂອບເຂດທີ່ມີປະສິດທິພາບ. ການຂຸດເຈາະຜ່ານຮູແລະຂຸມຕາບອດສາມາດຮັບຮູ້ໄດ້ໃນພາກສ່ວນວັດສະດຸດຽວແລະວັດສະດຸປະສົມ. ຂະບວນການເຄື່ອງຈັກຂອງເຄື່ອງມືເຄື່ອງຈັກໄດ້ຖືກຄວບຄຸມແບບດິຈິຕອນ, ແລະການດໍາເນີນງານແມ່ນສະດວກຫຼາຍ. ມັນສາມາດຮັບຮູ້ອັດຕະໂນມັດ, ຄວາມແມ່ນຍໍາສູງ, ແນວພັນທີ່ຫຼາກຫຼາຍແລະການຜະລິດຈໍານວນຫລາຍ. ເພື່ອຕອບສະຫນອງຄວາມຕ້ອງການຂອງການປຸງແຕ່ງຂອງຜູ້ໃຊ້ທີ່ແຕກຕ່າງກັນ, ບໍລິສັດໄດ້ພັດທະນາຜະລິດຕະພັນສຸດທ້າຍທີ່ຫລາກຫລາຍ. ນອກເຫນືອໄປຈາກແບບທໍາມະດາ, ພວກເຂົາຍັງສາມາດອອກແບບແລະປັບແຕ່ງຕາມຄວາມຕ້ອງການຕົວຈິງຂອງຜູ້ໃຊ້.

ໂຄງສ້າງເຄື່ອງຈັກ
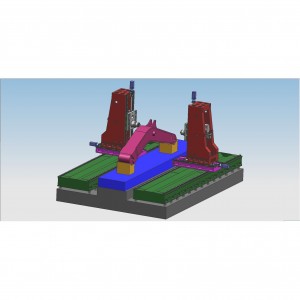
ອຸປະກອນນີ້ສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍຕຽງນອນ worktable, gantry ເຄື່ອນຍ້າຍໄດ້, saddle ເລື່ອນຍ້າຍໄດ້, ການເຈາະແລະ milling ຫົວພະລັງງານ, ອຸປະກອນ lubrication ອັດຕະໂນມັດແລະອຸປະກອນປ້ອງກັນ, ອຸປະກອນເຮັດຄວາມເຢັນ circulating, ລະບົບການຄວບຄຸມດິຈິຕອນ, ລະບົບໄຟຟ້າ, ແລະອື່ນໆ Rolling guide rail pair ສະຫນັບສະຫນູນແລະການຊີ້ນໍາ, ຄວາມແມ່ນຍໍາ. ຂັບຄູ່ screw ນໍາ, ເຄື່ອງມືເຄື່ອງຈັກມີຄວາມຖືກຕ້ອງຂອງຕໍາແຫນ່ງສູງແລະຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງຊ້ໍາອີກ.
1)ໂຕະເຮັດວຽກ:
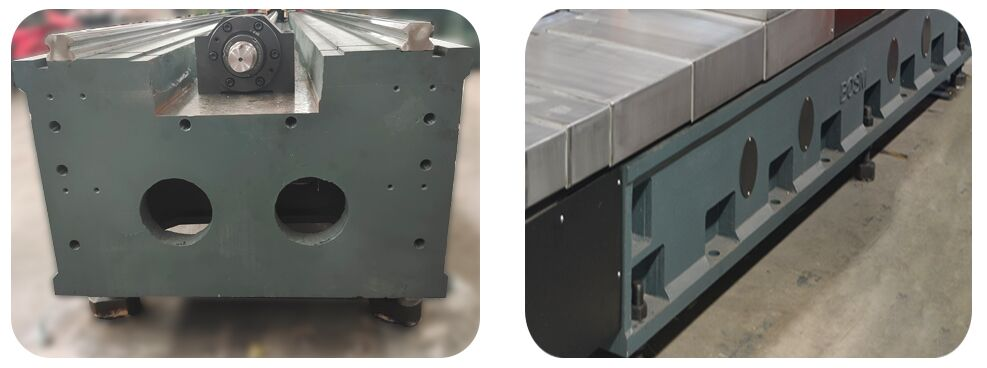
ຕຽງນອນແມ່ນການຫລໍ່ແບບຫນຶ່ງຊິ້ນ, ສໍາເລັດຫຼັງຈາກການປິ່ນປົວການຫມູນວຽນຂັ້ນສອງແລະການສັ່ນສະເທືອນ, ມີຄວາມແຂງກະດ້າງແບບເຄື່ອນໄຫວແລະສະຖິດທີ່ດີແລະບໍ່ມີການປ່ຽນແປງ. ມີ T-slots ທີ່ມີຮູບແບບສໍາເລັດຮູບທີ່ສົມເຫດສົມຜົນຢູ່ໃນຫນ້າຕາຕະລາງເຮັດວຽກສໍາລັບການ clamping workpieces. ພື້ນຖານຂອງຕຽງນອນແມ່ນມີ 2 ຄູ່ມືເສັ້ນທີ່ມີຄວາມແມ່ນຍໍາສູງ (4 ທັງສອງດ້ານໃນຈໍານວນທັງຫມົດ), ດັ່ງນັ້ນ slider ຄູ່ມືແມ່ນຄວາມກົດດັນເທົ່າທຽມກັນ, ເຊິ່ງຊ່ວຍປັບປຸງຄວາມເຂັ້ມງວດຂອງເຄື່ອງມືເຄື່ອງຈັກແລະການຕໍ່ຕ້ານ tensile ແລະການບີບອັດຂອງມັນຢ່າງຫຼວງຫຼາຍ. ລະບົບຂັບຮັບຮອງເອົາມໍເຕີ AC servo ແລະຄູ່ສະກູບານທີ່ມີຄວາມແມ່ນຍໍາ. ຂັບຂ້າງເຮັດໃຫ້ gantry ເຄື່ອນໄປໃນທິດທາງ X-axis. bolts ທີ່ສາມາດປັບໄດ້ແມ່ນແຈກຢາຍຢູ່ດ້ານລຸ່ມຂອງຕຽງນອນ, ເຊິ່ງສາມາດປັບລະດັບຂອງໂຕະເຮັດວຽກຂອງຕຽງໄດ້ຢ່າງງ່າຍດາຍ.
2)Moວີ້ງgantry:
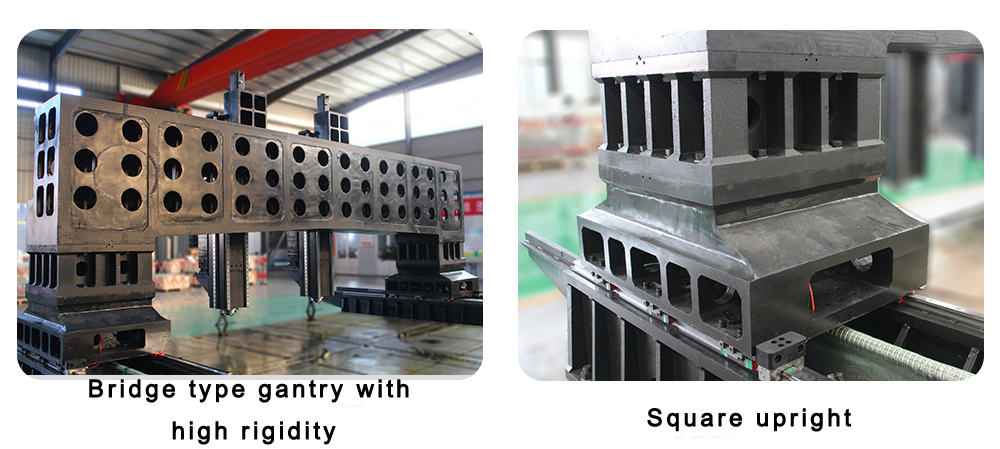
gantry ເຄື່ອນທີ່ໄດ້ຖືກໂຍນແລະປຸງແຕ່ງໂດຍທາດເຫຼັກສີຂີ້ເຖົ່າ (HT250). ຄູ່ຄູ່ຄູ່ຄູ່ຄູ່ຄູ່ຄູ່ຄູ່ຄູ່ສາຍເສັ້ນທີ່ມີຄວາມສາມາດບັນຈຸລູກປືນສູງສຸດ 55# ສູງທີ່ສຸດໄດ້ຖືກຕິດຕັ້ງຢູ່ດ້ານຫນ້າຂອງ gantry. ຊຸດຂອງຄູ່ສະກູບານທີ່ມີຄວາມແມ່ນຍໍາແລະມໍເຕີ servo ເຮັດໃຫ້ຫົວພະລັງງານເລື່ອນໄປໃນທິດທາງ Y-axis, ແລະຫົວພະລັງງານເຈາະໄດ້ຖືກຕິດຕັ້ງຢູ່ເທິງສະໄລ້ຫົວພະລັງງານ. ການເຄື່ອນໄຫວຂອງ gantry ແມ່ນຮັບຮູ້ໂດຍການຫມຸນຂອງຫມາກແຫ້ງເປືອກແຂງ screw ບານໃນ screw ບານໄດ້ຂັບເຄື່ອນໂດຍ servo motor ໂດຍຜ່ານການ coupling ຄວາມແມ່ນຍໍາ.
3)Moວີ້ງsaddle ເລື່ອນ:
saddle sliding ແມ່ນໂຄງສ້າງທາດເຫຼັກສຽງໂຫວດທັງຫມົດທີ່ມີຄວາມແມ່ນຍໍາ. ແຜ່ນສະໄລ້ໄດ້ຖືກຕິດຕັ້ງດ້ວຍສອງແຜ່ນ CNC linear rails ທີ່ມີນ້ໍາຫນັກສູງສຸດ, ຊຸດຂອງຄູ່ສະກູບານທີ່ມີຄວາມແມ່ນຍໍາແລະເຄື່ອງຫຼຸດຜ່ອນດາວເຄາະທີ່ມີຄວາມແມ່ນຍໍາສູງທີ່ເຊື່ອມຕໍ່ກັບມໍເຕີ servo, ແລະຕິດຕັ້ງດ້ວຍທໍ່ໄນໂຕຣເຈນທີ່ດຸ່ນດ່ຽງ, ດຸ່ນດ່ຽງນ້ໍາຫນັກຂອງ. ຫົວພະລັງງານ, ຫຼຸດຜ່ອນການໂຫຼດຂອງ screw ນໍາ, ຍືດອາຍຸຂອງ screw ນໍາ, ຂັບລົດຫົວພະລັງງານເຈາະເພື່ອຍ້າຍອອກໄປໃນທິດທາງ Z-axis, ແລະຮັບຮູ້ການໄປຂ້າງຫນ້າໄວ, ເຮັດວຽກໄປຂ້າງຫນ້າ, ໄວ reverse, ແລະຢຸດການປະຕິບັດຂອງ. ຫົວພະລັງງານ, ມີ chip breaking ອັດຕະໂນມັດ, ການໂຍກຍ້າຍ chip, ການທໍາງານພັກໄວ້.
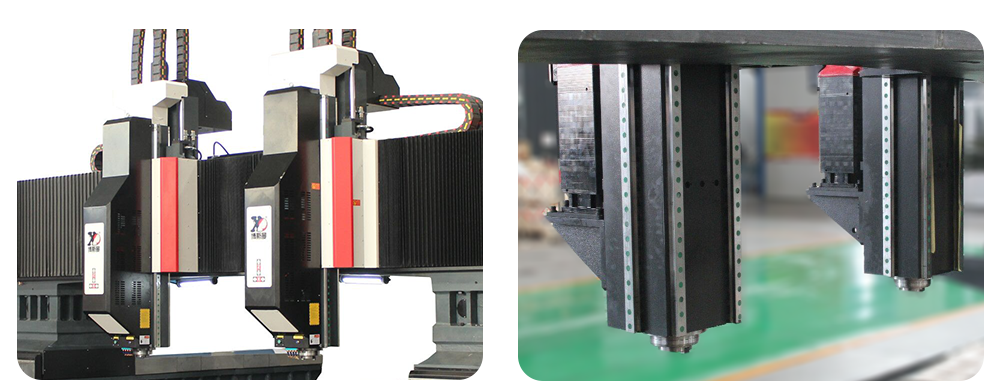
4)ເຈາະຫົວພະລັງງານ( spindle):
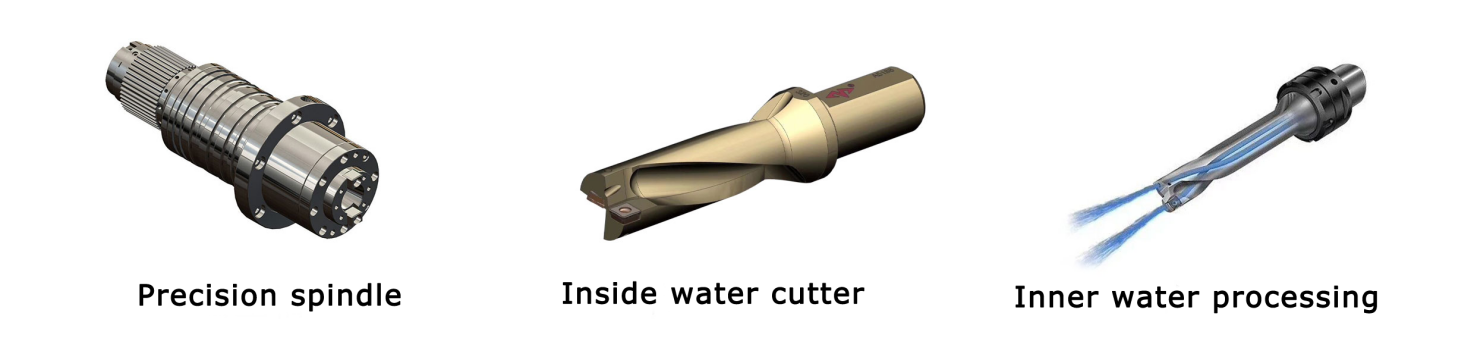
ຫົວພະລັງງານເຈາະຮັບຮອງເອົາມໍເຕີ servo spindle ທີ່ອຸທິດຕົນ, ເຊິ່ງຖືກຂັບເຄື່ອນໂດຍການເລັ່ງສາຍແອວ synchronous ແຂ້ວເພື່ອເພີ່ມແຮງບິດແລະຂັບລົດ spindle ຄວາມແມ່ນຍໍາທີ່ອຸທິດຕົນ. The spindle adopts ສີ່ຄັ້ງທໍາອິດແລະຫລັງສອງຫົກແຖວເກັດທີ່ຢູ່ຂອງລູກປືນການຕິດຕໍ່ເປັນລ່ຽມຍີ່ປຸ່ນເພື່ອບັນລຸການປ່ຽນແປງຄວາມໄວ stepless. spindle ແມ່ນໄດ້ຮັບການຕິດຕັ້ງທີ່ມີລະບົບການປ່ຽນແປງເຄື່ອງມື pneumatic ເພື່ອເຮັດໃຫ້ເຄື່ອງມືການທົດແທນແມ່ນໄວແລະງ່າຍ, ແລະອາຫານແມ່ນຂັບເຄື່ອນໂດຍ servo motor ແລະສະກູບານໄດ້. ແກນ X ແລະ Y ສາມາດເຊື່ອມຕໍ່ໄດ້, ໂດຍໃຊ້ການຄວບຄຸມແບບເຄິ່ງປິດ, ເຊິ່ງສາມາດຮັບຮູ້ຫນ້າທີ່ interpolation ເສັ້ນແລະວົງ. ປາຍ spindle ແມ່ນ BT50 taper ຂຸມ, ມີອຸປະກອນຮ່ວມກັບ Rotofors Italian ຄວາມໄວສູງ, ຊຶ່ງສາມາດປະມວນຜົນໄດ້ໂດຍສູນກາງ U-drilling ຄວາມໄວສູງ.
4.1 ຮ່າງກາຍກ່ອງແລະຕາຕະລາງເລື່ອນຂອງຫົວພະລັງງານເຈາະແມ່ນເຮັດດ້ວຍຫລໍ່ເພື່ອເພີ່ມຄວາມເຂັ້ມງວດແລະຄວາມຫມັ້ນຄົງ, ແລະຫຼຸດຜ່ອນການສັ່ນສະເທືອນແລະສຽງ.
4.2 ເຄື່ອງມືເຄື່ອງຈັກສາມາດດໍາເນີນການໄດ້ໂດຍ handwheel ເອເລັກໂຕຣນິກ; ເພື່ອປະຫຍັດເວລາແລະປັບປຸງປະສິດທິພາບການຜະລິດໃນລະຫວ່າງການປຸງແຕ່ງ, ຫຼັງຈາກເຈາະຮູທໍາອິດເພື່ອກໍານົດຕໍາແຫນ່ງອາຫານ, ການເຈາະຮູທີ່ຍັງເຫຼືອຂອງປະເພດດຽວກັນສາມາດບັນລຸໄດ້ໄວ → ກ້າວຫນ້າການເຮັດວຽກ → ກັບຄືນໄວມັນຄວນຈະມີຫນ້າທີ່ເຊັ່ນ: chip ອັດຕະໂນມັດ. ການທຳລາຍ, ການຖອດຊິບ, ແລະຢຸດຊົ່ວຄາວ.
4.3 ram ໄດ້ຖືກຕິດຕັ້ງດ້ວຍລະບົບການດຸ່ນດ່ຽງໄນໂຕຣເຈນຂອງແຫຼວເພື່ອຫຼຸດຜ່ອນການໂຫຼດແກນ Z ແລະເພີ່ມອາຍຸການຮັບໃຊ້ຂອງສະກູ Z-axis.
4.4 ມໍເຕີ servo ແກນ Z ຮັບຮອງເອົາມໍເຕີເບກປິດພະລັງງານ, ເຊິ່ງຈະຖືຫ້າມລໍ້ໃນເວລາທີ່ພະລັງງານໄດ້ຖືກຕັດຢ່າງກະທັນຫັນເພື່ອຫຼີກເວັ້ນການອຸປະຕິເຫດທີ່ເກີດຈາກການຕົກຂອງກ່ອງ spindle.
4.5 ຫົວຂໍ້
4.5.1. ກ່ອງ shaft ຕົ້ນຕໍ adopts ສີ່ຄູ່ມື linear ຫນັກ, ມີຄວາມແຂງຂອງການເຄື່ອນໄຫວສູງ, ຄວາມຖືກຕ້ອງຂອງຕໍາແຫນ່ງສູງ, ແລະຄວາມຫມັ້ນຄົງໃນຄວາມໄວຕ່ໍາທີ່ດີ.
4.5.2. Z-axis drive-ມໍເຕີ servo ແມ່ນເຊື່ອມຕໍ່ໂດຍກົງກັບ screw ບານໂດຍຜ່ານການ coupling, ແລະ screw ບານເຮັດໃຫ້ headstock ຍ້າຍຂຶ້ນແລະລົງເທິງ saddle ເພື່ອຮັບຮູ້ອາຫານແກນ Z. ມໍເຕີແກນ Z ມີຫນ້າທີ່ຫ້າມລໍ້ອັດຕະໂນມັດ. ໃນກໍລະນີທີ່ມີການຂັດຂ້ອງຂອງພະລັງງານ, ແກນມໍເຕີຖືກຍຶດແຫນ້ນເພື່ອປ້ອງກັນບໍ່ໃຫ້ມັນຫມຸນ.
4.5.3. ກຸ່ມ spindle ຮັບຮອງເອົາໄຕ້ຫວັນ Jianchun spindle outlet ນ້ໍາພາຍໃນຄວາມໄວສູງ, ເຊິ່ງມີຄວາມແມ່ນຍໍາສູງແລະປະສິດທິພາບສູງ. shaft ຕົ້ນຕໍ grasps ມີດໂດຍພາກຮຽນ spring butterfly ສຸດ shaft ຕົ້ນຕໍທີ່ມີແຮງດັນທີ່ເຮັດຫນ້າທີ່ກ່ຽວກັບເລັບດຶງຂອງ handle ເຄື່ອງມືໂດຍຜ່ານກົນໄກການ broach ສີ່ສ່ວນ, ແລະເຄື່ອງມືວ່າງ adopts ວິທີການ pneumatic.
5)ອຸປະກອນ lubrication ອັດຕະໂນມັດແລະອຸປະກອນປ້ອງກັນ:
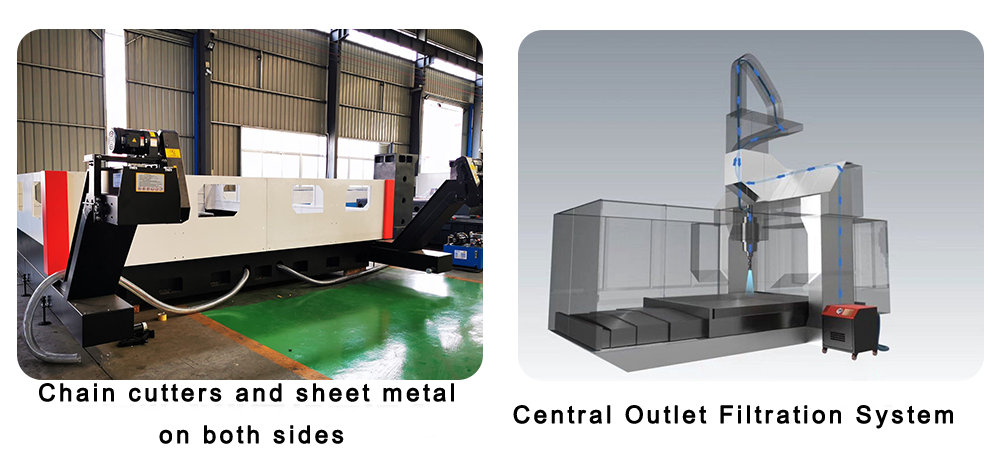
ມີເຄື່ອງລໍາລຽງຊິບອັດຕະໂນມັດຢູ່ທັງສອງດ້ານຂອງ workbench ແລະການກັ່ນຕອງຢູ່ໃນຕອນທ້າຍຂອງ. ເຄື່ອງລໍາລຽງຊິບອັດຕະໂນມັດແມ່ນປະເພດຕ່ອງໂສ້ຮາບພຽງ. ຂ້າງຫນຶ່ງມີປັ໊ມເຮັດຄວາມເຢັນ, ແລະທໍ່ອອກແມ່ນເຊື່ອມຕໍ່ກັບລະບົບການກັ່ນຕອງນ້ໍາກາງດ້ວຍທໍ່. , coolant ໄຫຼເຂົ້າໄປໃນ chip conveyor, chip conveyor lift pump pumps coolant ເຂົ້າໄປໃນລະບົບການກັ່ນຕອງ outlet ກາງ, ແລະ pump ຄວາມເຢັນຄວາມກົດດັນສູງ circulates coolant ການກັ່ນຕອງໄປຫາ spindle ເຈາະ coolant. ມັນຍັງມີອຸປະກອນທີ່ມີ trolley ການຂົນສົ່ງ chip, ທີ່ສະດວກຫຼາຍໃນການຂົນສົ່ງ chip. ອຸປະກອນນີ້ແມ່ນມີອຸປະກອນເຄື່ອງເຮັດຄວາມເຢັນພາຍໃນແລະພາຍນອກ. ເມື່ອການຂຸດເຈາະຄວາມໄວສູງຖືກນໍາໃຊ້, ຄວາມເຢັນພາຍໃນຂອງເຄື່ອງມືຖືກນໍາໃຊ້, ແລະຄວາມເຢັນຈາກພາຍນອກແມ່ນໃຊ້ສໍາລັບການຂຸດແສງສະຫວ່າງ.
5.1. ລະບົບການກັ່ນຕອງນ້ໍາສູນກາງ:
ເຄື່ອງມືເຄື່ອງຈັກນີ້ແມ່ນມີອຸປະກອນການກັ່ນຕອງນ້ໍາສູນກາງ, ເຊິ່ງປະສິດທິພາບສາມາດກັ່ນຕອງ impurities ໃນ coolant. ລະບົບສີດນ້ໍາພາຍໃນສາມາດປ້ອງກັນບໍ່ໃຫ້ pins ທາດເຫຼັກຖືກ entangled ກັບເຄື່ອງມືໃນລະຫວ່າງການປະມວນຜົນ, ຫຼຸດຜ່ອນການສວມໃສ່ຂອງເຄື່ອງມື, ຍືດອາຍຸເຄື່ອງມື, ແລະປັບປຸງການສໍາເລັດຮູບຂອງ workpiece ໄດ້. ປາຍເຄື່ອງມືທໍ່ລະບາຍນ້ໍາທີ່ມີຄວາມກົດດັນສູງສາມາດປ້ອງກັນພື້ນຜິວຂອງ workpiece ໄດ້ດີ, ປ້ອງກັນການຮ່ວມ rotary ຄວາມໄວສູງ, ປ້ອງກັນ impurities ຈາກການຂັດຂວາງການຮ່ວມ rotary, ປັບປຸງຄຸນນະພາບຂອງ workpiece ໂດຍລວມ, ແລະປັບປຸງປະສິດທິພາບການເຮັດວຽກ.
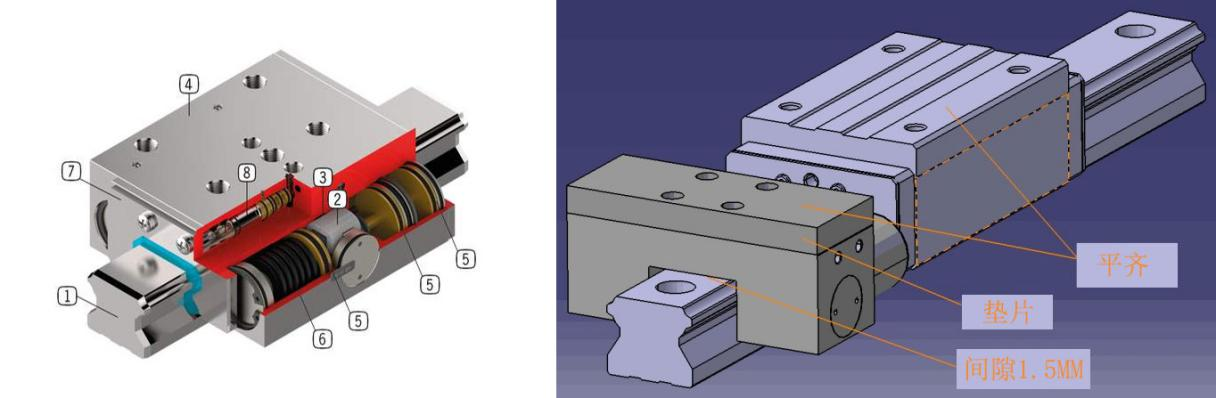
6)Linear Clamper:
clamp ແມ່ນປະກອບດ້ວຍຮ່າງກາຍຕົ້ນຕໍຂອງ clamp, actuators, ແລະອື່ນໆ. ມັນເປັນອົງປະກອບປະສິດທິພາບສູງທີ່ໃຊ້ໃນການສົມທົບກັບຄູ່ຄູ່ມືເສັ້ນມ້ວນ. ໂດຍຜ່ານຫຼັກການຂອງການຂະຫຍາຍຕົວຜົນບັງຄັບໃຊ້ wedge block, ມັນສ້າງຜົນບັງຄັບໃຊ້ clamping ທີ່ເຂັ້ມແຂງ; ມັນມີ gantry ຄົງ, ຕໍາແຫນ່ງທີ່ຊັດເຈນ, ຕ້ານການສັ່ນສະເທືອນແລະການທໍາງານເພື່ອປັບປຸງຄວາມແຂງ.
ມັນມີລັກສະນະດັ່ງຕໍ່ໄປນີ້:
ຄວາມປອດໄພແລະເຊື່ອຖືໄດ້, ແຮງຍຶດທີ່ເຂັ້ມແຂງ, clamping ແກນ XY ທີ່ບໍ່ເຄື່ອນຍ້າຍໃນລະຫວ່າງການຂຸດເຈາະແລະການປາດຢາງ.
ຜົນບັງຄັບໃຊ້ clamping ສູງທີ່ສຸດເພີ່ມຄວາມເຂັ້ມງວດຂອງອາຫານຕາມແກນແລະປ້ອງກັນບໍ່ໃຫ້ fretting ທີ່ເກີດຈາກການສັ່ນສະເທືອນ.
ການຕອບສະຫນອງໄວ, ເວລາຕອບສະຫນອງການເປີດແລະປິດແມ່ນພຽງແຕ່ 0.06 ວິນາທີ, ເຊິ່ງສາມາດປົກປ້ອງເຄື່ອງມືຂອງເຄື່ອງຈັກແລະເພີ່ມຊີວິດຂອງສະກູນໍາ.
ທົນທານ, ດ້ານ nickel-plated, ປະສິດທິພາບຕ້ານການ rust ດີ.
ການອອກແບບນະວະນິຍາຍເພື່ອຫຼີກເວັ້ນການກະທົບກະເທືອນໃນເວລາທີ່ເຄັ່ງຄັດ.
7)ການຈັດຕໍາແຫນ່ງແລະການຍຶດຂອງ workpiece ໄດ້
ສໍາລັບການຈັດລຽງຂອງ workpiece flange ໄດ້ຕະຫຼອດ, ມັນສາມາດໄດ້ຮັບການວາງ arbitrarily ເທິງແຜ່ນສະຫນັບສະຫນູນທີ່ມີ T-slots, ແລະຕໍາແຫນ່ງສູນກາງແມ່ນວັດແທກໂດຍ finder ແຂບທີ່ຕິດຕັ້ງຢູ່ໃນຮູ taper spindle ຢູ່ສາມຈຸດ (ເສັ້ນຜ່າກາງພາຍໃນຫຼືເສັ້ນຜ່າກາງນອກ) ໃນ workpiece ໄດ້. . ຫຼັງຈາກນັ້ນ, ມັນແມ່ນໄດ້ຮັບອັດຕະໂນມັດໂດຍການຄິດໄລ່ໂຄງການຄວບຄຸມຕົວເລກ, ເຊິ່ງແມ່ນຖືກຕ້ອງແລະໄວ. ການຍຶດຂອງ workpiece ແມ່ນ clamped ໂດຍ clamp ປະກອບດ້ວຍແຜ່ນກົດ, rod ejector, rod tie ແລະ cushion block, ທີ່ສະດວກໃນການນໍາໃຊ້.
8)ອຸປະກອນການຫລໍ່ລື່ນອັດຕະໂນມັດ
ເຄື່ອງມືເຄື່ອງນີ້ແມ່ນມີອຸປະກອນເຄື່ອງ lubrication ອັດຕະໂນມັດສ່ວນ volumetric ຕົ້ນສະບັບຂອງໄຕ້ຫວັນ, ເຊິ່ງອັດຕະໂນມັດສາມາດ lubricate ຄູ່ການເຄື່ອນໄຫວຕ່າງໆເຊັ່ນ: rails ຄູ່ມື, screws ນໍາ, racks, ແລະອື່ນໆ, ໂດຍບໍ່ມີການສິ້ນສຸດຕາຍ, ແລະຮັບປະກັນຊີວິດການບໍລິການຂອງເຄື່ອງມືເຄື່ອງຈັກ. ລາງລົດໄຟຄູ່ມືທັງສອງດ້ານຂອງຕຽງເຄື່ອງໄດ້ຖືກຕິດຕັ້ງດ້ວຍຜ້າຄຸມປ້ອງກັນສະແຕນເລດ, ແລະທັງສອງດ້ານຂອງຫົວພະລັງງານ gantry ເຄື່ອນຍ້າຍໄດ້ຖືກຕິດຕັ້ງດ້ວຍຜ້າຄຸມປ້ອງກັນທີ່ມີຄວາມຍືດຫຍຸ່ນ. ຜ້າກັນກະດ້າງກັນນ້ໍາຖືກຕິດຕັ້ງຢູ່ອ້ອມຮອບໂຕະເຮັດວຽກ, ແລະສາຍທໍ່ນ້ໍາຖືກປົກປ້ອງໂດຍຕ່ອງໂສ້ລາກພາດສະຕິກ. ຜ້າມ່ານສາຍ PVC ໂປ່ງໃສຖືກຕິດຕັ້ງອ້ອມຮອບ spindle.

9)ຕົວຄວບຄຸມ CNC ດິຈິຕອນເຕັມຮູບແບບ:
9.1. ດ້ວຍການທໍາງານຂອງ chip breaking, ເວລາ breaking chip ແລະ chip breaking cycle ສາມາດຖືກຕັ້ງຢູ່ໃນການໂຕ້ຕອບ man-machine.
9.2. ດ້ວຍຟັງຊັນຍົກເຄື່ອງມື, ລະດັບຄວາມສູງຂອງເຄື່ອງມືສາມາດຖືກຕັ້ງຢູ່ໃນການໂຕ້ຕອບຂອງເຄື່ອງຈັກ. ເມື່ອເຈາະເຖິງລະດັບຄວາມສູງນີ້, ແຜ່ນເຈາະໄດ້ຖືກຍົກຂຶ້ນຢ່າງໄວວາໄປຫາດ້ານເທິງຂອງ workpieces, ແລະຫຼັງຈາກນັ້ນ shavings, ຫຼັງຈາກນັ້ນໄວຕໍ່ກັບຫນ້າດິນເຈາະແລະປ່ຽນອັດຕະໂນມັດເປັນອາຫານການເຮັດວຽກ.
9.3. ກ່ອງຄວບຄຸມການດໍາເນີນງານສູນກາງແລະຫນ່ວຍງານ handheld ຮັບຮອງເອົາລະບົບການຄວບຄຸມຕົວເລກ, ແລະມີການໂຕ້ຕອບ USB ແລະຈໍສະແດງຜົນຜລຶກຂອງແຫຼວ LCD. ເພື່ອອໍານວຍຄວາມສະດວກໃນການຂຽນໂປລແກລມ, ການເກັບຮັກສາ, ການສະແດງຜົນແລະການສື່ສານ, ການໂຕ້ຕອບການດໍາເນີນງານມີຫນ້າທີ່ເຊັ່ນ: ການສົນທະນາກັບເຄື່ອງຈັກ, ການຊົດເຊີຍຄວາມຜິດພາດ, ແລະການແຈ້ງເຕືອນອັດຕະໂນມັດ.
9.4. ອຸປະກອນມີຫນ້າທີ່ສະແດງຕົວຢ່າງແລະການກວດກາຄືນໃຫມ່ຂອງຕໍາແຫນ່ງຂຸມກ່ອນທີ່ຈະປຸງແຕ່ງ, ເຊິ່ງສະດວກຫຼາຍໃນການດໍາເນີນງານ.

10)ຕົວຊອກຫາຂອບແສງ:
ອຸປະກອນດັ່ງກ່າວແມ່ນມີເຄື່ອງຊອກຫາຂອບ photoelectric, ເຊິ່ງສາມາດຊອກຫາຕໍາແຫນ່ງຂອງ workpiece ໄດ້ສະດວກແລະໄວ.
1) ຕິດຕັ້ງຕົວຊອກຫາຂອບເຂົ້າໄປໃນ chuck spindle ຂອງເຄື່ອງມືເຄື່ອງຈັກ, ແລະຊ້າໆ rotate spindle ເພື່ອແກ້ໄຂ concentricity ຂອງຕົນ.
2) ຍ້າຍ spindle ກັບ handwheel, ເພື່ອໃຫ້ຂອບຂອງລູກເຫຼັກ finder ແຂບໄດ້ສໍາຜັດກັບ workpiece ໄດ້ແສງສະຫວ່າງ, ແລະໄຟສີແດງໄດ້ເປີດ. ໃນເວລານີ້, spindle ສາມາດເຄື່ອນໄປຂ້າງຫນ້າແລະຖອຍຫລັງຊ້ໍາຊ້ອນເພື່ອຊອກຫາຈຸດທີ່ດີທີ່ສຸດທີ່ຂອບຂອງລູກເຫຼັກຂອງ finder edge ແຕະກັບ workpiece ໄດ້. .
3) ບັນທຶກຄ່າແກນ X ແລະ Y ທີ່ສະແດງໂດຍລະບົບ CNC ໃນເວລານີ້, ແລະຕື່ມຂໍ້ມູນໃສ່ໃນຄອມພິວເຕີ້.
4) ຊອກຫາຈຸດກວດຫາຫຼາຍອັນດ້ວຍວິທີນີ້
11)ເຄື່ອງມືສວມໃສ່ປຸກ
ເຄື່ອງມືສວມໃສ່ປຸກສ່ວນໃຫຍ່ແມ່ນກວດພົບປັດຈຸບັນຂອງມໍເຕີ spindle. ເມື່ອປະຈຸບັນເກີນມູນຄ່າທີ່ກໍານົດໄວ້, ອຸປະກອນຈະຕັດສິນອັດຕະໂນມັດວ່າເຄື່ອງມືໄດ້ຫມົດໄປ, ແລະ spindle ຈະຖອນເຄື່ອງມືອັດຕະໂນມັດໃນເວລານີ້, ແລະໂຄງການອັດຕະໂນມັດຈະສິ້ນສຸດລົງ. ເຕືອນຜູ້ປະຕິບັດການວ່າເຄື່ອງມືໄດ້ຫມົດໄປ.
12)ສັນຍານເຕືອນລະດັບນ້ໍາຕ່ໍາ
1) ໃນເວລາທີ່ coolant ໃນການກັ່ນຕອງແມ່ນຢູ່ໃນລະດັບກາງ, ລະບົບອັດຕະໂນມັດເຊື່ອມຕໍ່ກັບມໍເຕີເພື່ອເລີ່ມຕົ້ນການ, ແລະ coolant ໃນ chip conveyor ອັດຕະໂນມັດໄຫລເຂົ້າໄປໃນການກັ່ນຕອງ. ເມື່ອມັນມາຮອດລະດັບສູງ, ມໍເຕີຈະຢຸດເຮັດວຽກໂດຍອັດຕະໂນມັດ.
2) ເມື່ອເຄື່ອງເຮັດຄວາມເຢັນໃນການກັ່ນຕອງຢູ່ໃນລະດັບຕໍ່າ, ລະບົບຈະເຕືອນເຄື່ອງວັດແທກລະດັບເຕືອນອັດຕະໂນມັດ, spindle ຈະດຶງເຄື່ອງມືອັດຕະໂນມັດ, ແລະເຄື່ອງຈະຢຸດເຮັດວຽກ.
13) ການທໍາງານຂອງຫນ່ວຍຄວາມຈໍາປິດ
ເນື່ອງຈາກການຢຸດເຊົາການເຮັດວຽກທີ່ເກີດຈາກຄວາມລົ້ມເຫຼວຂອງພະລັງງານຢ່າງກະທັນຫັນ, ຫນ້າທີ່ນີ້ສາມາດຊອກຫາຕໍາແຫນ່ງຂອງຂຸມສຸດທ້າຍທີ່ເຈາະໄດ້ໄວແລະສະດວກກ່ອນທີ່ຈະເກີດຄວາມລົ້ມເຫຼວຂອງພະລັງງານ. ຜູ້ປະຕິບັດງານສາມາດດໍາເນີນຂັ້ນຕອນຕໍ່ໄປໄດ້ໄວ, ປະຫຍັດເວລາຄົ້ນຫາ.
ການກວດກາເລເຊີສາມແກນ:
ແຕ່ລະເຄື່ອງຂອງ Bosman ໄດ້ຖືກປັບດ້ວຍເລເຊີ interferometer ຂອງບໍລິສັດອັງກິດ RENISHAW, ແລະກວດສອບຢ່າງຖືກຕ້ອງແລະຊົດເຊີຍຄວາມຜິດພາດຂອງ pitch, backlash, ຄວາມຖືກຕ້ອງຂອງຕໍາແຫນ່ງ, ຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງຊ້ໍາອີກ, ແລະອື່ນໆ, ເພື່ອຮັບປະກັນຄວາມຫມັ້ນຄົງ, ສະຖຽນລະພາບແບບເຄື່ອນໄຫວແລະຄວາມຖືກຕ້ອງຂອງການປຸງແຕ່ງຂອງເຄື່ອງຈັກ. . ການກວດສອບ Ballbar ແຕ່ລະເຄື່ອງຈັກໃຊ້ ballbar ຂອງບໍລິສັດ RENISHAW ຂອງອັງກິດເພື່ອປັບຄວາມຖືກຕ້ອງຂອງວົງກົມທີ່ແທ້ຈິງແລະຄວາມຖືກຕ້ອງທາງເລຂາຄະນິດຂອງເຄື່ອງຈັກ. ໃນເວລາດຽວກັນ, ການທົດລອງຕັດຮູບວົງມົນແມ່ນດໍາເນີນເພື່ອຮັບປະກັນຄວາມຖືກຕ້ອງຂອງເຄື່ອງຈັກ 3D ແລະຄວາມຖືກຕ້ອງຂອງວົງ.

ການຈັດວາງເວທີ, ການຍຶດ workpiece, ຄວາມຕ້ອງການການໂຍກຍ້າຍ chip ອັດຕະໂນມັດ
1. ເວທີຕົ້ນຕໍ (1 pcs): T-slot clamping workpiece. ທັງດ້ານເທິງສຸດແລະດ້ານຂ້າງຂອງເວທີຕົ້ນຕໍສາມາດນໍາໃຊ້ເປັນພື້ນຜິວການຈັດຕໍາແຫນ່ງການປຸງແຕ່ງ.
2. ເວທີການຫລົ້ມຈົມ (1 pcs): (ດ້ານຂ້າງແມ່ນອຸປະກອນເສີມດ້ວຍກອບການກົດດັນ, ແລະດ້ານເທິງແມ່ນໄດ້ຖືກຕິດຕັ້ງດ້ວຍຜ້າຫຸ້ມປ້ອງກັນຢ່າງເຕັມທີ່, ອອກແບບແລະຕິດຕັ້ງໂດຍຜູ້ຂາຍ), ຄໍາແນະນໍາການຈັດຕໍາແຫນ່ງແລະຂັ້ນຕອນການປຸງແຕ່ງຕົ້ນຕໍ:
ການປະມວນຜົນການປົກຫຸ້ມຂອງວາວ: ການຈັດຕໍາແຫນ່ງຂອງເວທີຕ່ໍາ ( handles ສະຫນັບສະຫນູນລຸ່ມແລະ workpieces ຂະຫນາດທີ່ແຕກຕ່າງກັນ), ແຜ່ນຄວາມກົດດັນເທິງໄດ້ຖືກແກ້ໄຂໂດຍການກົດຫຼືຜູ້ຂາຍອອກແບບອຸປະກອນ clamping ເທິງອັດຕະໂນມັດ.
ການປຸງແຕ່ງຮ່າງກາຍຂອງວາວ: ການຈັດຕໍາແຫນ່ງຂອງເວທີຕ່ໍາ ( handles ສະຫນັບສະຫນູນລຸ່ມແລະ workpieces ຂະຫນາດທີ່ແຕກຕ່າງກັນ), handles ຂ້າງຂອງຖັນຊ່ວຍຂອງເວທີຕ່ໍາແລະ rods ejector ເສີມຮູບ L ຖືກກົດດັນແລະສ້ອມແຊມຫຼືຜູ້ຂາຍອອກແບບເທິງອັດຕະໂນມັດ. ອຸປະກອນຍຶດ.

ຂໍ້ມູນຈໍາເພາະ
| ຕົວແບບ | BOSM-DS3030 | BOSM-DS4040 | BOSM-DS5050 | BOSM-DS6060 | |
| ຂະຫນາດເຮັດວຽກ | ຍາວ*ກວ້າງ | 3000*3000 | 4000*4000 | 5000*5000 | 6000*6000 |
| ຫົວເຈາະແນວຕັ້ງ | Spindle taper | BT50 | |||
| ເສັ້ນຜ່າສູນກາງເຈາະ (ມມ) | φ96 | ||||
| ເສັ້ນຜ່າສູນກາງການປາດ (ມມ) | M36 | ||||
| ຄວາມໄວ spindle (r/min) | 30~3000/60~6000 | ||||
| ພະລັງງານມໍເຕີ spindle (kw) | 22/30/37 | ||||
| Spindle Nose ກັບຕາຕະລາງໄລຍະຫ່າງ | ອີງຕາມຂໍ້ມູນຈາກມູນນິທິ | ||||
| ຄວາມຖືກຕ້ອງຂອງການຈັດຕຳແໜ່ງຊ້ຳ (X/Y/Z) | X/Y/Z | ± 0.01/1000mm | |||
| ລະບົບຄວບຄຸມ | KND/GSK/SIEMENS | ||||
| ເຄື່ອງມືວາລະສານ | ເຄື່ອງມືວາລະສານ Okada ທີ່ມີ 24 ເຄື່ອງມືເປັນທາງເລືອກ | ||||
ການກວດກາຄຸນນະພາບ
ແຕ່ລະເຄື່ອງຂອງ Bosman ໄດ້ຖືກປັບດ້ວຍ laser interferometer ຈາກບໍລິສັດ United Kingdom RENISHAW, ເຊິ່ງກວດສອບຢ່າງຖືກຕ້ອງແລະຊົດເຊີຍຄວາມຜິດພາດຂອງ pitch, backlash, ຄວາມຖືກຕ້ອງຂອງຕໍາແຫນ່ງ, ແລະຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງຊ້ໍາກັນເພື່ອຮັບປະກັນຄວາມຫມັ້ນຄົງຂອງເຄື່ອງຈັກ, ສະຖຽນລະພາບ static, ແລະຄວາມຖືກຕ້ອງຂອງການປຸງແຕ່ງ. . ການທົດສອບແຖບບານແຕ່ລະເຄື່ອງຈັກໃຊ້ເຄື່ອງທົດສອບແຖບບານຈາກບໍລິສັດ RENISHAW ຂອງອັງກິດເພື່ອແກ້ໄຂຄວາມຖືກຕ້ອງຂອງວົງກົມທີ່ແທ້ຈິງແລະຄວາມຖືກຕ້ອງທາງເລຂາຄະນິດຂອງເຄື່ອງຈັກ, ແລະປະຕິບັດການທົດລອງຕັດວົງກົມໃນເວລາດຽວກັນເພື່ອຮັບປະກັນຄວາມຖືກຕ້ອງຂອງເຄື່ອງຈັກ 3D ແລະຄວາມຖືກຕ້ອງຂອງວົງມົນ.

ສະພາບແວດລ້ອມການນໍາໃຊ້ເຄື່ອງມືເຄື່ອງຈັກ
1.1 ຄວາມຕ້ອງການດ້ານສິ່ງແວດລ້ອມຂອງອຸປະກອນ
ການຮັກສາລະດັບອຸນຫະພູມອາກາດລ້ອມຮອບຄົງທີ່ແມ່ນປັດໃຈສໍາຄັນສໍາລັບການເຄື່ອງຈັກທີ່ມີຄວາມແມ່ນຍໍາ.
(1) ອຸນຫະພູມອາກາດລ້ອມຮອບສາມາດໃຊ້ໄດ້ -10 ℃ ~ 35 ℃ . ເມື່ອອຸນຫະພູມສະພາບແວດລ້ອມແມ່ນ 20 ℃, ຄວາມຊຸ່ມຊື່ນຄວນຈະເປັນ 40 ~ 75%.
(2) ເພື່ອຮັກສາຄວາມຖືກຕ້ອງສະຖິດຂອງເຄື່ອງມືເຄື່ອງຈັກພາຍໃນຂອບເຂດທີ່ກໍານົດ, ອຸນຫະພູມອາກາດລ້ອມຮອບທີ່ດີທີ່ສຸດແມ່ນຕ້ອງການ 15 ° C ຫາ 25 ° C ທີ່ມີຄວາມແຕກຕ່າງຂອງອຸນຫະພູມ.
ມັນບໍ່ຄວນເກີນ ± 2 ℃ / 24h.
1.2 ແຮງດັນການສະຫນອງພະລັງງານ: 3-phase, 380V, ການເຫນັງຕີງຂອງແຮງດັນພາຍໃນ ± 10%, ຄວາມຖີ່ຂອງການສະຫນອງພະລັງງານ: 50HZ.
1.3 ຖ້າແຮງດັນໃນພື້ນທີ່ໃຊ້ບໍ່ຫມັ້ນຄົງ, ເຄື່ອງມືຂອງເຄື່ອງຈັກຄວນໄດ້ຮັບການຕິດຕັ້ງດ້ວຍການສະຫນອງພະລັງງານທີ່ມີການຄວບຄຸມເພື່ອຮັບປະກັນການເຮັດວຽກປົກກະຕິຂອງເຄື່ອງມືເຄື່ອງຈັກ.
1.4. ເຄື່ອງມືຂອງເຄື່ອງຈັກຄວນມີສາຍດິນທີ່ເຊື່ອຖືໄດ້: ສາຍດິນແມ່ນສາຍທອງແດງ, ເສັ້ນຜ່າສູນກາງຂອງສາຍບໍ່ຄວນຫນ້ອຍກວ່າ 10mm², ແລະຄວາມຕ້ານທານຂອງດິນແມ່ນຫນ້ອຍກວ່າ 4 ohms.
1.5 ເພື່ອຮັບປະກັນການເຮັດວຽກປົກກະຕິຂອງອຸປະກອນ, ຖ້າອາກາດບີບອັດຂອງແຫຼ່ງອາກາດບໍ່ສອດຄ່ອງກັບຄວາມຕ້ອງການຂອງແຫຼ່ງອາກາດ, ຄວນເພີ່ມຊຸດອຸປະກອນການເຮັດຄວາມສະອາດຂອງແຫຼ່ງອາກາດ ( dehumidification, degreasing, filtering) ກ່ອນ. ການຮັບອາກາດຂອງເຄື່ອງຈັກ.
1.6. ອຸປະກອນຄວນໄດ້ຮັບການເກັບຮັກສາໄວ້ຫ່າງຈາກແສງແດດໂດຍກົງ, ການສັ່ນສະເທືອນແລະຄວາມຮ້ອນ, ແລະຢູ່ຫ່າງຈາກເຄື່ອງປັ່ນໄຟຄວາມຖີ່ສູງ, ເຄື່ອງເຊື່ອມໄຟຟ້າ, ແລະອື່ນໆ, ເພື່ອຫຼີກເວັ້ນການຄວາມລົ້ມເຫຼວຂອງການຜະລິດເຄື່ອງຈັກຫຼືການສູນເສຍຄວາມຖືກຕ້ອງຂອງເຄື່ອງຈັກ.
ກ່ອນ&ຫຼັງການບໍລິການ
1) ກ່ອນການບໍລິການ
ໂດຍຜ່ານການສຶກສາຄໍາຮ້ອງຂໍແລະຂໍ້ມູນທີ່ຈໍາເປັນຈາກລູກຄ້າຫຼັງຈາກນັ້ນຄໍາຕິຊົມກັບວິສະວະກອນຂອງພວກເຮົາ, ທີມງານ Bossman Technical ຮັບຜິດຊອບໃນການສື່ສານດ້ານວິຊາການກັບລູກຄ້າແລະການສ້າງການແກ້ໄຂ, ການຊ່ວຍເຫຼືອລູກຄ້າໃນການເລືອກເອົາການແກ້ໄຂເຄື່ອງຈັກທີ່ເຫມາະສົມແລະເຄື່ອງຈັກທີ່ເຫມາະສົມ.
2) ຫຼັງຈາກການບໍລິການ
A. ເຄື່ອງທີ່ມີການຮັບປະກັນຫນຶ່ງປີແລະຈ່າຍສໍາລັບການບໍາລຸງຮັກສາຕະຫຼອດຊີວິດ.
B. ໃນໄລຍະການຮັບປະກັນຫນຶ່ງປີຫຼັງຈາກເຄື່ອງມາຮອດທ່າເຮືອປາຍທາງ, BOSSMAN ຈະສະຫນອງການບໍລິການບໍາລຸງຮັກສາທີ່ບໍ່ເສຍຄ່າແລະທັນເວລາສໍາລັບຄວາມຜິດຕ່າງໆທີ່ບໍ່ແມ່ນຄົນສ້າງຂຶ້ນໃນເຄື່ອງ, ແລະໃຫ້ທັນເວລາປ່ຽນຊິ້ນສ່ວນຄວາມເສຍຫາຍທີ່ບໍ່ໄດ້ເຮັດທຸກປະເພດໂດຍບໍ່ເສຍຄ່າ. ຄ່າໃຊ້ຈ່າຍ. ຄວາມລົ້ມເຫຼວທີ່ເກີດຂື້ນໃນໄລຍະການຮັບປະກັນຕ້ອງໄດ້ຮັບການສ້ອມແປງໃນຄ່າໃຊ້ຈ່າຍທີ່ເຫມາະສົມ.
C.Technical ສະຫນັບສະຫນູນໃນ 24 ຊົ່ວໂມງອອນໄລນ໌, TM, Skype, ອີເມລ, ການແກ້ໄຂຄໍາຖາມພີ່ນ້ອງໃນເວລາ. ຖ້າຫາກວ່າບໍ່ສາມາດແກ້ໄຂໄດ້, BOSSMAN ຈະຈັດໃຫ້ມີວິສະວະກອນຫຼັງການຂາຍທັນທີທັນໃດມາຮອດບ່ອນສໍາລັບການສ້ອມແປງ, ຜູ້ຊື້ຕ້ອງການຈ່າຍຄ່າ VISA, ປີ້ຍົນແລະທີ່ພັກ.
ເວັບໄຊຂອງລູກຄ້າ