BOSM-1601 ເຄື່ອງຈັກຂັດຫົວເຈາະ
1. ການນໍາໃຊ້ອຸປະກອນ
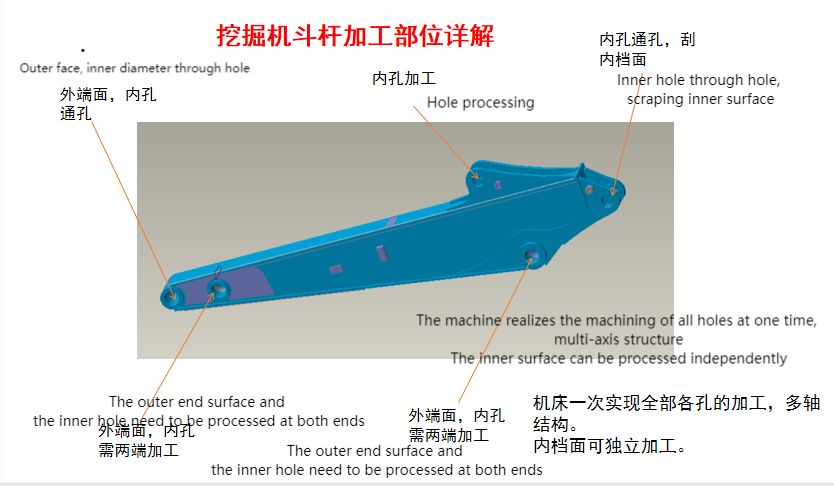
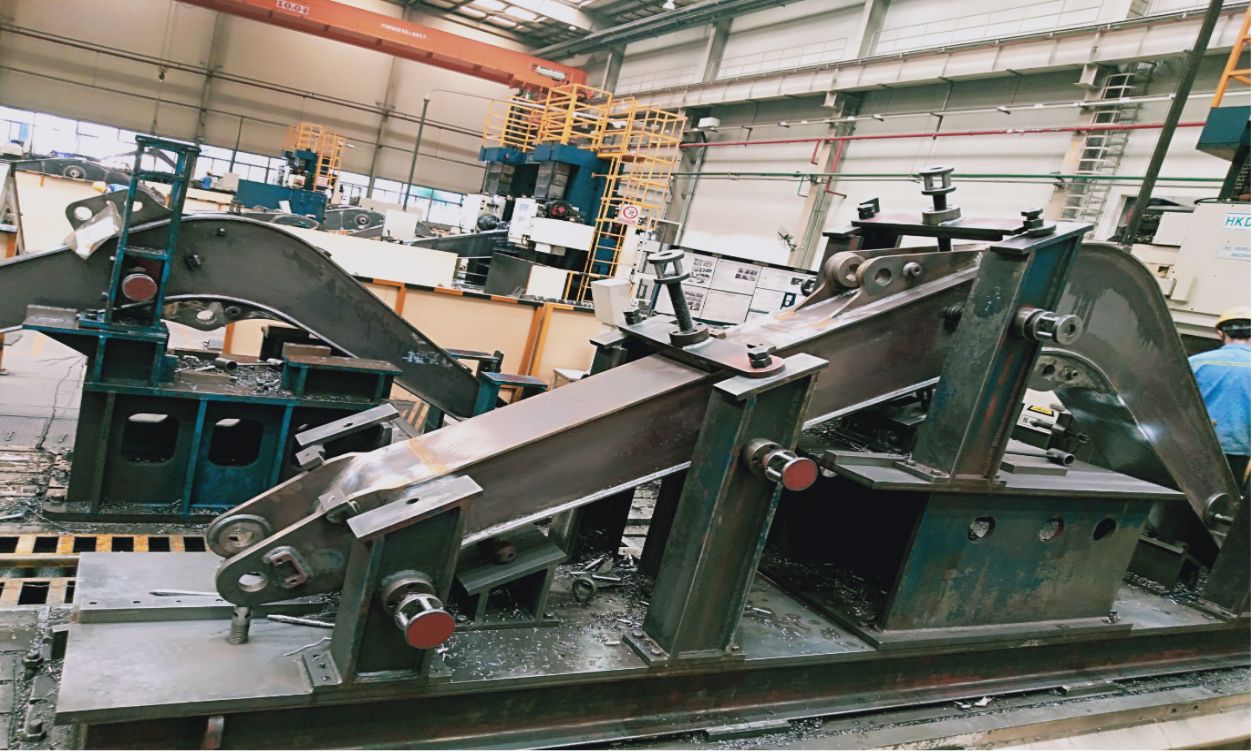
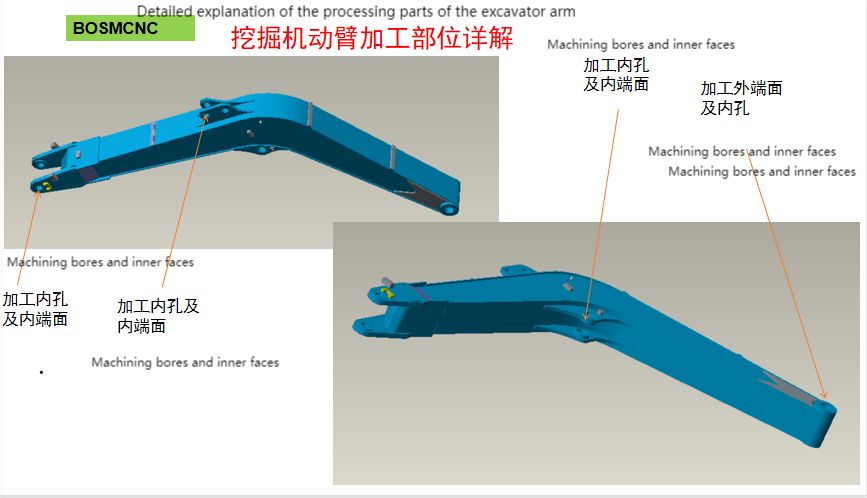
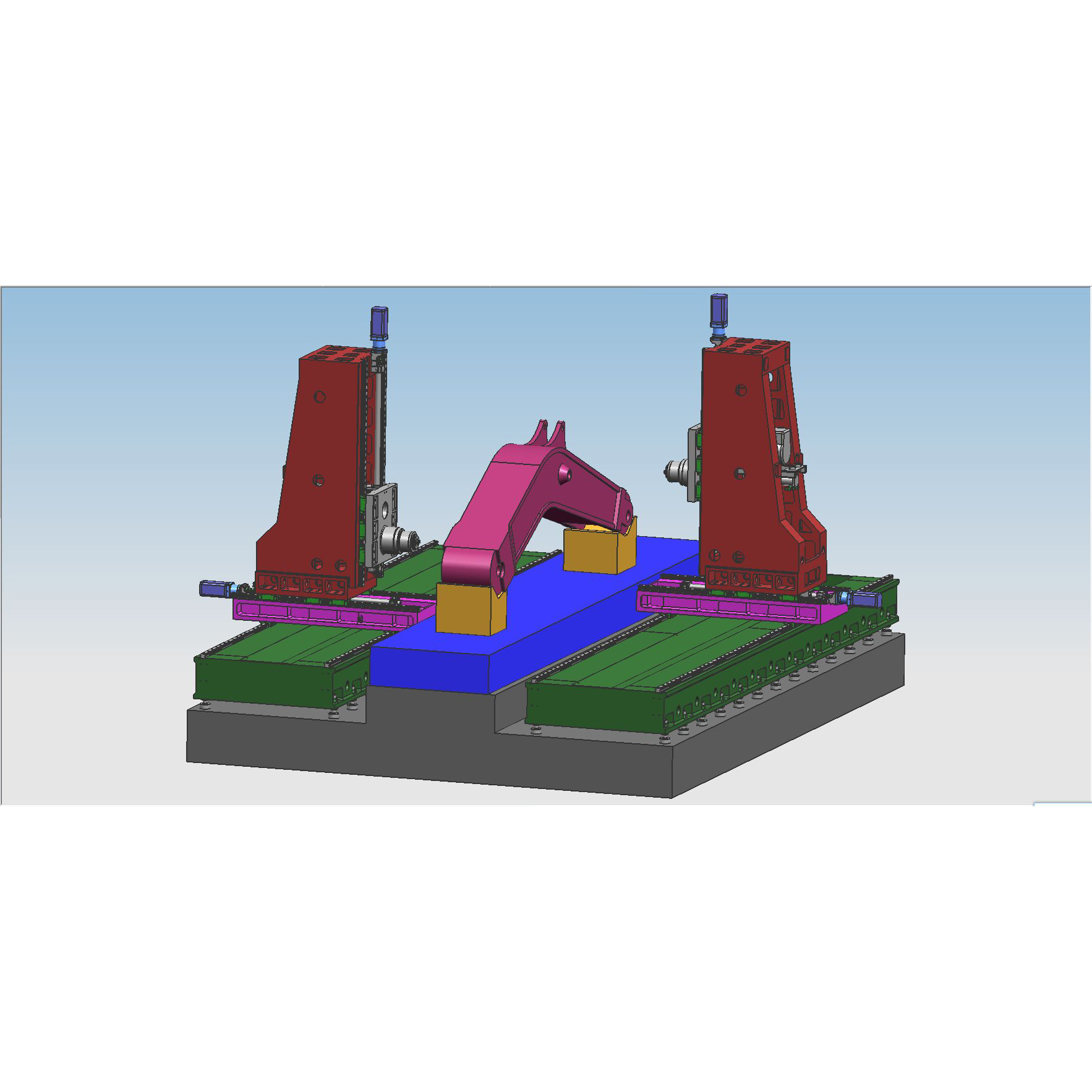
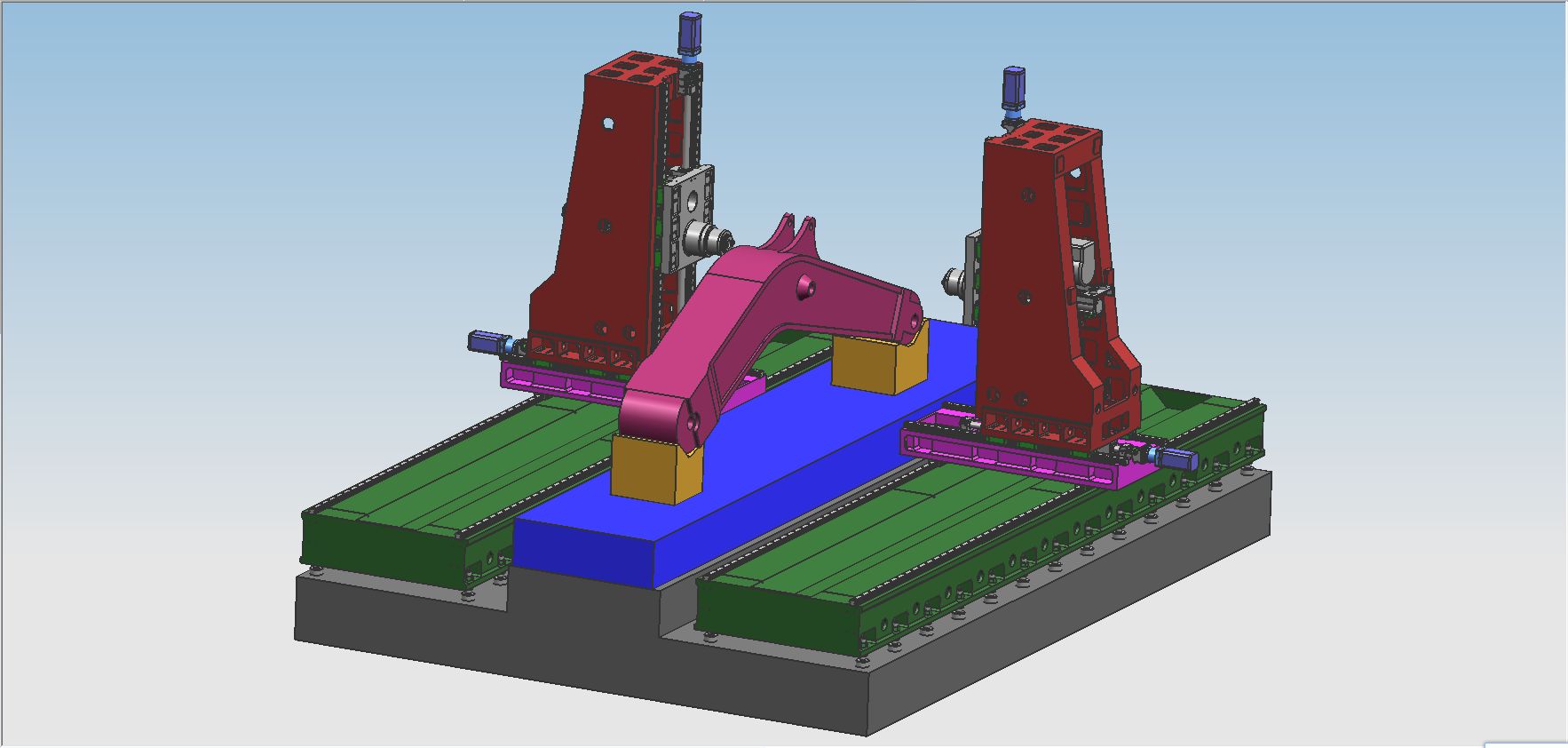
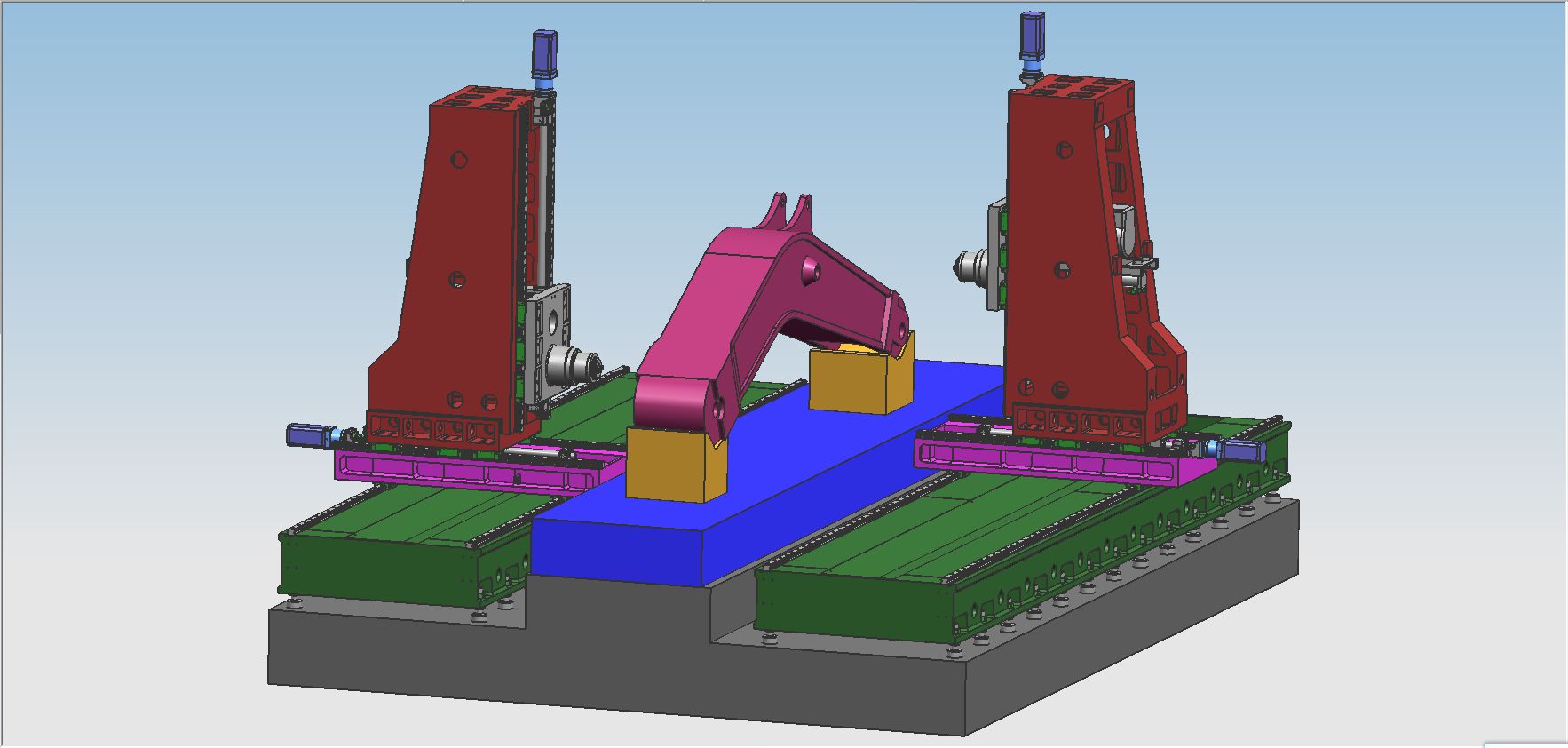
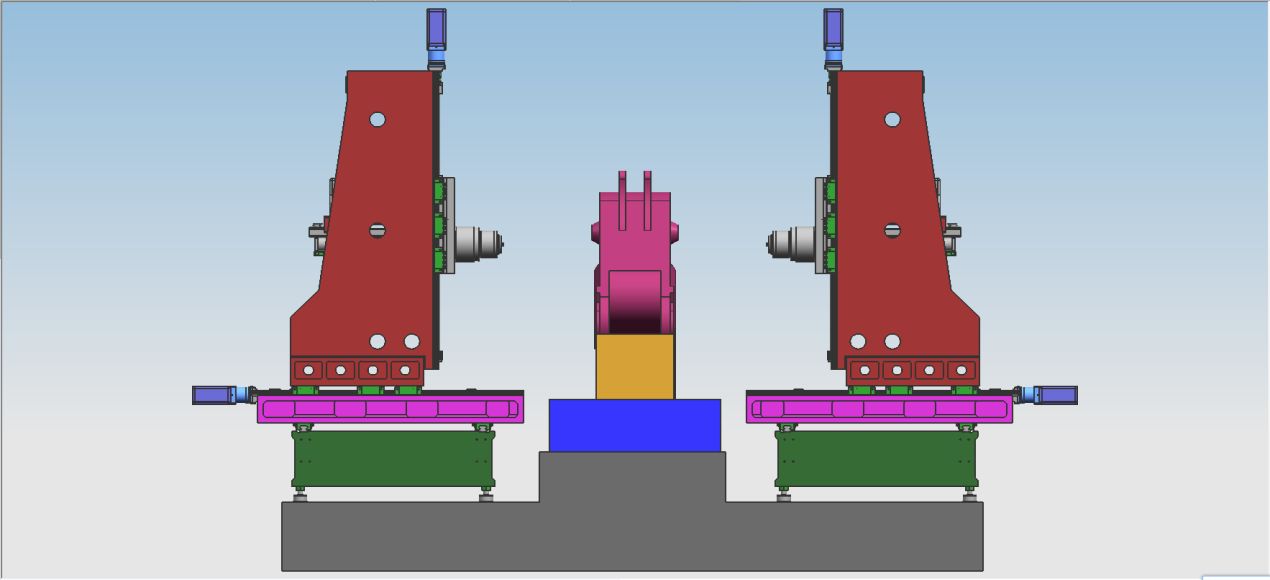
BOSM-1601 double-station numerical control column mobile double-column head-to-head boring and milling machine is a special Machine for symmetrical workpieces of construction machinery. ເຄື່ອງໄດ້ຖືກຕິດຕັ້ງດ້ວຍຖັນທີ່ສາມາດເຄື່ອນຍ້າຍໄດ້ພິເສດແລະສອງຊຸດຂອງ rams ອອກຕາມລວງນອນ, ເຊິ່ງສາມາດຮັບຮູ້ການເຈາະ, milling, ເຈາະແລະການປຸງແຕ່ງອື່ນໆຂອງ workpiece ພາຍໃນຂອບເຂດເສັ້ນເລືອດຕັນໃນປະສິດທິພາບ, workpiece ສາມາດໄດ້ຮັບການປະມວນຜົນໃນສະຖານທີ່ໃນເວລາດຽວ (ບໍ່ຈໍາເປັນຕ້ອງຮອງ. clamping), ຄວາມໄວໃນການໂຫຼດແລະ unloading ໄວ, ຄວາມໄວຕໍາແຫນ່ງໄວ, ຄວາມຖືກຕ້ອງຂອງການປຸງແຕ່ງສູງແລະປະສິດທິພາບການປຸງແຕ່ງສູງ.
2. ອົງປະກອບຫຼັກຂອງເຄື່ອງຈັກ
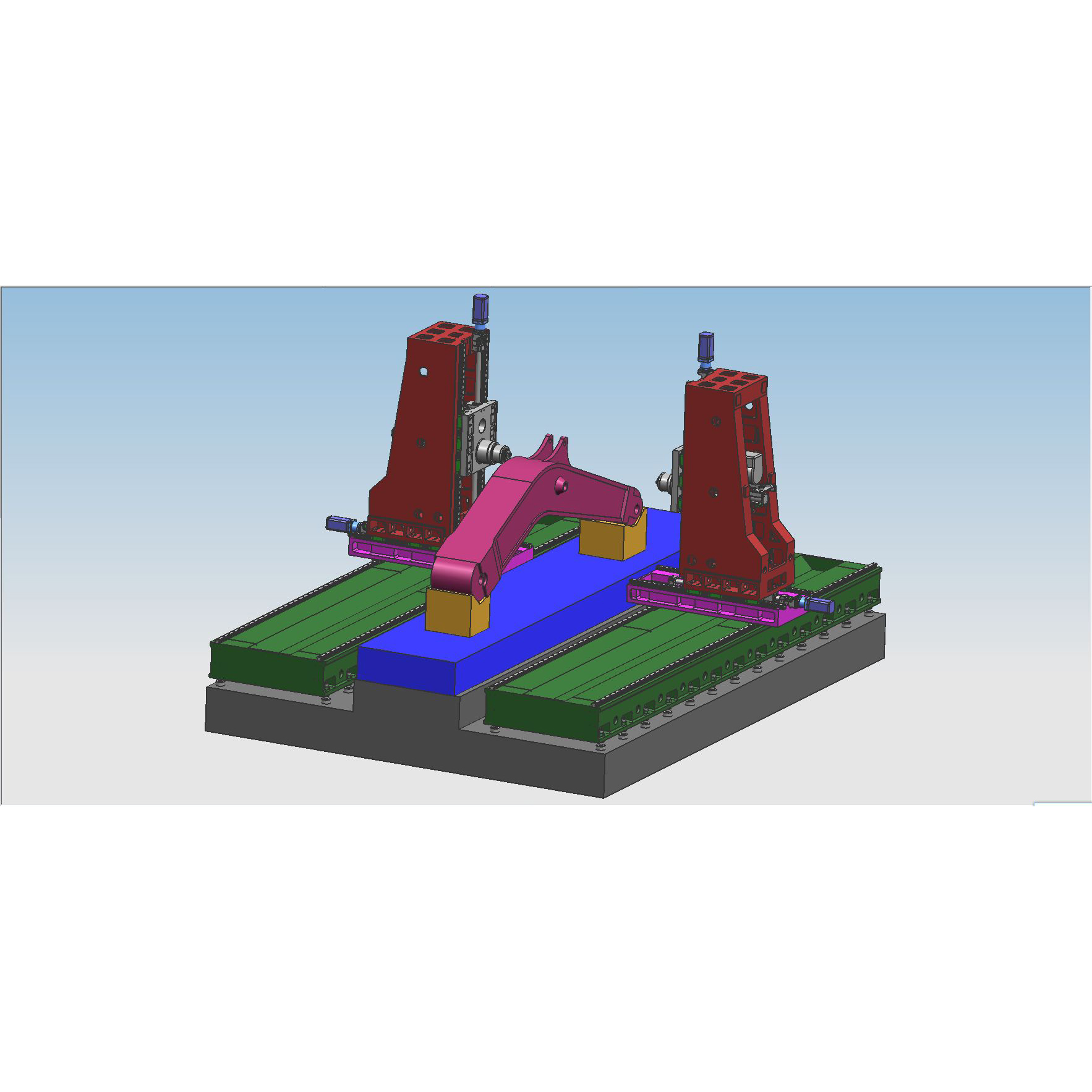
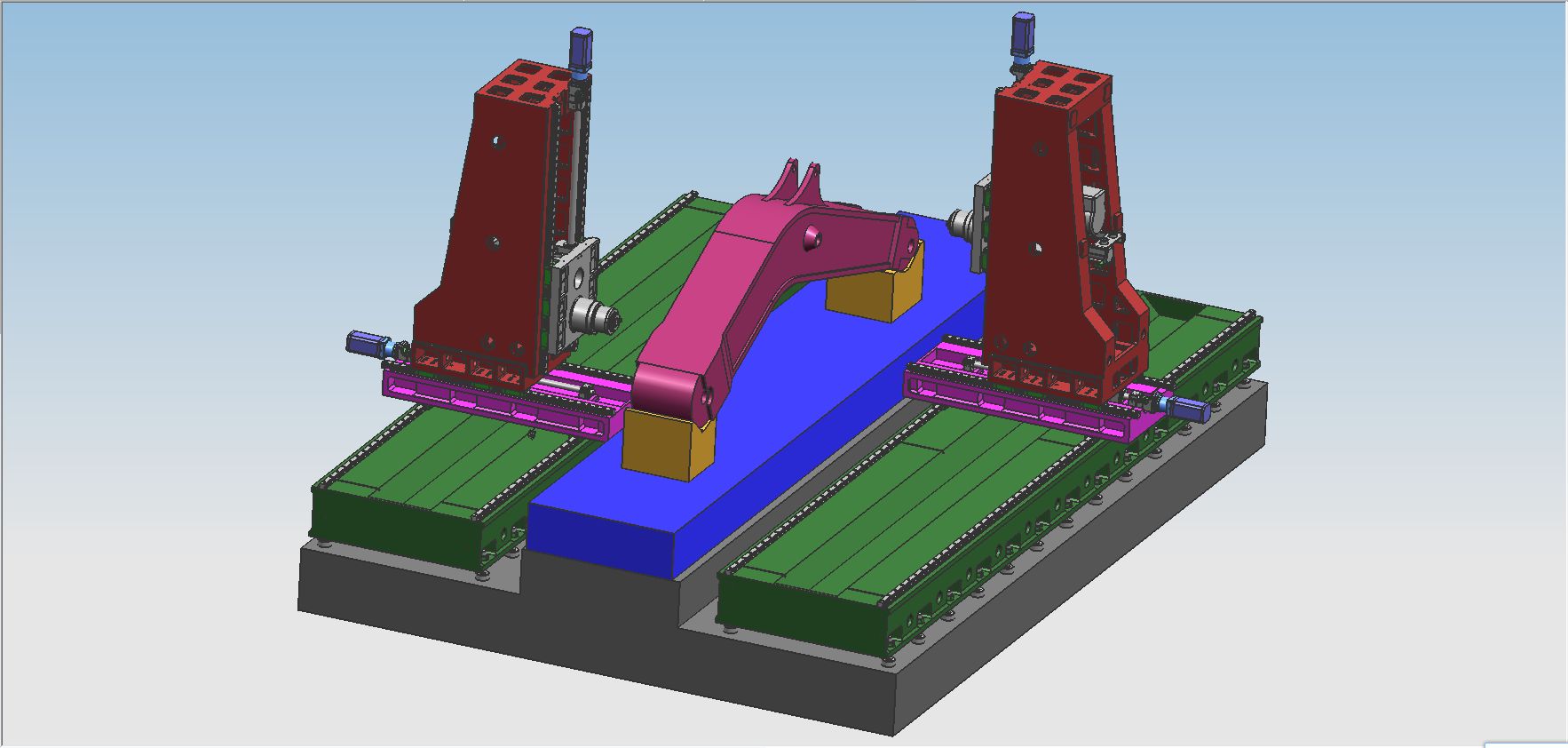
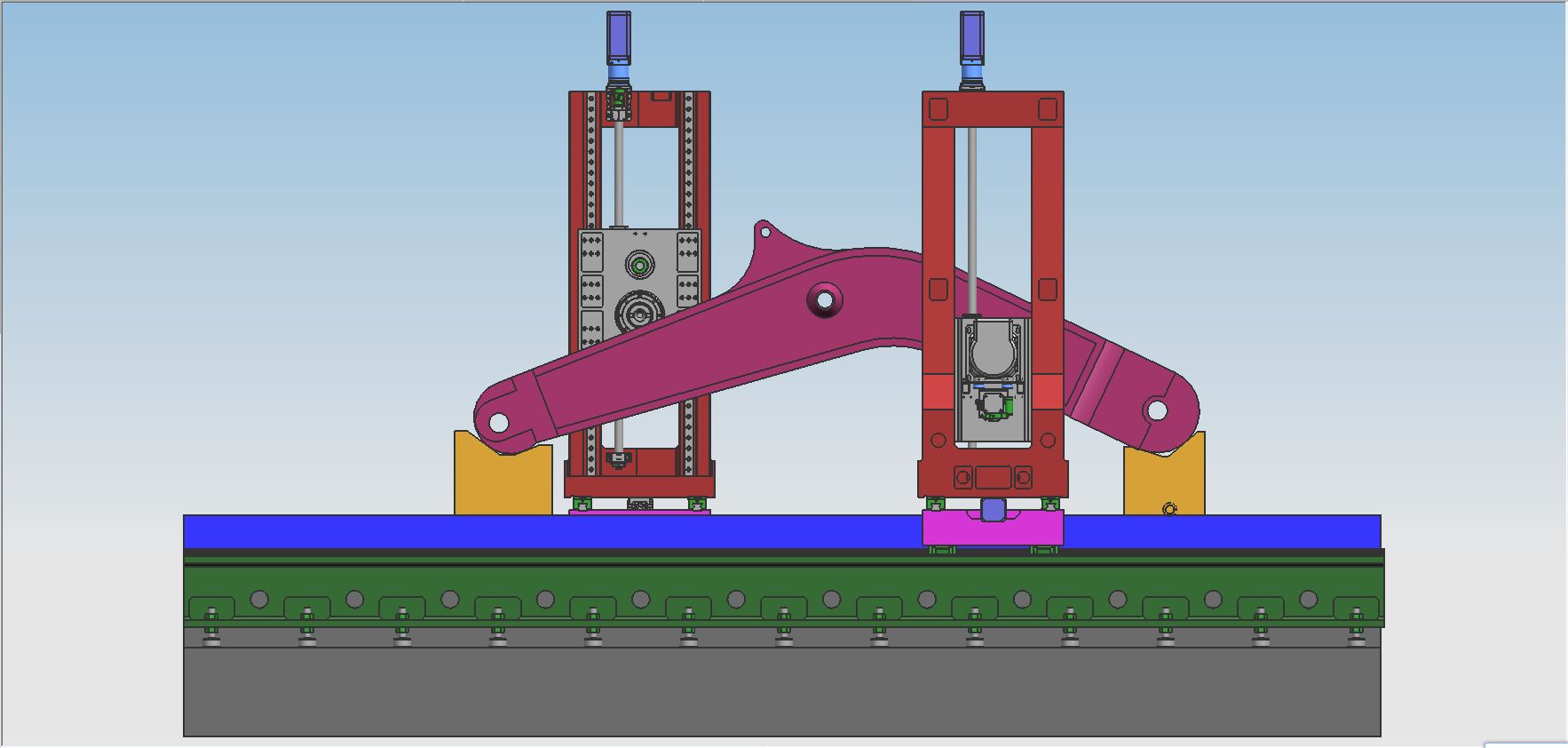
ຕຽງນອນ, ບ່ອນນັ່ງເຮັດວຽກ, ຖັນຊ້າຍແລະຂວາ, beams, saddles, rams ແລະພາກສ່ວນຂະຫນາດໃຫຍ່ອື່ນໆທັງຫມົດແມ່ນເຮັດດ້ວຍດິນຊາຍ molding, ເຫຼັກສີຂີ້ເຖົ່າສູງ 250 casting, annealed ໃນຂຸມດິນຊາຍຮ້ອນ → vibration aging → furnace ຮ້ອນ annealing → vibration aging → ເຄື່ອງຈັກ rough → Vibration aging → furnace ຮ້ອນ annealing → vibration aging →ສໍາເລັດຮູບ, ກໍາຈັດຄວາມກົດດັນທາງລົບຂອງພາກສ່ວນຢ່າງສົມບູນ, ແລະຮັກສາການປະຕິບັດຂອງພາກສ່ວນທີ່ຫມັ້ນຄົງ. ເຄື່ອງມີຫນ້າທີ່ເຊັ່ນ: milling, boring, drilling, countersinking, tapping, ແລະອື່ນໆ, ແລະວິທີການເຮັດຄວາມເຢັນຂອງເຄື່ອງມືແມ່ນຄວາມເຢັນພາຍນອກ, ເຄື່ອງມີ 6 feed axes, ເຊິ່ງສາມາດຮັບຮູ້ການເຊື່ອມໂຍງ 4-axis ແລະ 6-axis single-action. ມີ 2 ຫົວພະລັງງານ. ທິດທາງແກນຂອງເຄື່ອງຈັກແລະຫົວພະລັງງານແມ່ນສະແດງຢູ່ໃນຮູບຂ້າງລຸ່ມນີ້.
2.1ໂຄງສ້າງຕົ້ນຕໍຂອງພາກສ່ວນອາຫານການສົ່ງຜ່ານ axial
2.1.1 X1/X2 ແກນ:ຖັນ reciprocates ຕາມລວງຍາວຕາມເສັ້ນທາງຄູ່ມືຂອງຕຽງຄົງທີ່.
ການສົ່ງສັນຍານ X-axis: ຂັບເຄື່ອນແລະຄວບຄຸມໂດຍ AC servo motor, ການຫຼຸດຜ່ອນຄວາມແມ່ນຍໍາສູງຂອງດາວເຄາະໄດ້ຂັບລົດສອງຖັນເພື່ອຍ້າຍ linearly ຕາມແກນ X ຜ່ານຄູ່ສົ່ງບານ screw.
ຮູບແບບລົດໄຟຄູ່ມື: ລາງລົດໄຟຄູ່ມືເສັ້ນທີ່ມີຄວາມແມ່ນຍໍາສູງສອງອັນຖືກວາງໄວ້ຮາບພຽງ. ລະດັບຄວາມແມ່ນຍໍາຂອງ screw ບານໃນຄູ່ສາຍສົ່ງແມ່ນ C5.
2.1.2 ແກນ Y1/Y2:ຫົວພະລັງງານເຈາະ ແລະ milling I, II ແລະຄໍລໍາຂອງພວກມັນຖືກຕິດຕັ້ງຕາມລໍາດັບໃນແຖບຄູ່ມືພື້ນຖານທີ່ມີຄວາມເຂັ້ມແຂງສູງທັງສອງດ້ານ, ແລະ reciprocate ຕາມເສັ້ນທາງຄູ່ມືພື້ນຖານຕາມແກນ Y1 ແລະ Y2. ມໍເຕີ AC servo ຖືກນໍາໃຊ້ເພື່ອຂັບແລະຄວບຄຸມຄູ່ສົ່ງ screw ບານ, ລາກ saddle ເພື່ອຍ້າຍ, ແລະຮັບຮູ້ການເຄື່ອນໄຫວ linear ຕາມແກນ Y.
ຮູບແບບທາງລົດໄຟຄູ່ມື: 4 ເສັ້ນຄູ່ມື rails + ບານ screw drive. ເກຣດຄວາມຖືກຕ້ອງຂອງສະກູບານໃນຄູ່ສາຍສົ່ງແມ່ນ C5, ແລະການຄວບຄຸມເຄິ່ງປິດ-loop ໄດ້ຖືກຮັບຮອງເອົາ.
2.1.3 ແກນ Z1/Z2:ຫົວພະລັງງານເຈາະ ແລະ milling I, II ແລະ saddles ເລື່ອນຂອງເຂົາເຈົ້າໄດ້ຖືກຕິດຕັ້ງໃນແນວຕັ້ງຢູ່ດ້ານຫນ້າຂອງຖັນທັງສອງດ້ານ, ແລະ reciprocate ຕາມແກນ Z1 ແລະ Z2 ຂຶ້ນແລະລົງ rails ນໍາພາຖັນ.
ລະບົບສາຍສົ່ງ Z1-axis: AC servo motor ຖືກນໍາໃຊ້ເພື່ອຂັບແລະຄວບຄຸມການຫຼຸດຜ່ອນດາວເຄາະຄວາມແມ່ນຍໍາສູງແລະຄູ່ສາຍສົ່ງ screw ບານ, ແລະ ram ໄດ້ຖືກຂັບເຄື່ອນເພື່ອເຄື່ອນຍ້າຍເສັ້ນລຽບຕາມແກນ Z.
ຮູບແບບລົດໄຟຄູ່ມື: 2 ໂຄງສ້າງລົດໄຟຄູ່ມືເສັ້ນຖືກຮັບຮອງເອົາ. ລະດັບຄວາມຖືກຕ້ອງຂອງສະກູບານໃນຄູ່ສາຍສົ່ງແມ່ນ C5.
2.2 ການຖອດຊິບ ແລະເຮັດຄວາມເຢັນ
ມີທໍ່ລໍາລຽງ chip ກ້ຽວວຽນແລະຮາບພຽງຢູ່ສອງດ້ານພາຍໃຕ້ບ່ອນເຮັດວຽກ, ແລະຊິບສາມາດຖືກລໍາລຽງອັດຕະໂນມັດໄປສູ່ທໍ່ລໍາລຽງ chip ໃນຕອນທ້າຍໂດຍຜ່ານສອງຂັ້ນຕອນຂອງແຜ່ນກ້ຽວວຽນແລະລະບົບຕ່ອງໂສ້ເພື່ອຮັບຮູ້ການຜະລິດອາລະຍະທໍາ. ມີປັ໊ມເຮັດຄວາມເຢັນຢູ່ໃນຖັງ coolant ຂອງລໍາລຽງຊິບ, ເຊິ່ງສາມາດນໍາໃຊ້ສໍາລັບການເຮັດຄວາມເຢັນພາຍນອກຂອງເຄື່ອງມືເພື່ອຮັບປະກັນປະສິດທິພາບແລະຊີວິດການບໍລິການຂອງເຄື່ອງມື, ແລະ coolant ສາມາດນໍາມາໃຊ້ໃຫມ່.
3. ລະບົບຄວບຄຸມຕົວເລກດິຈິຕອນເຕັມຮູບແບບ:
3.1. ດ້ວຍການທໍາງານຂອງ chip breaking, ເວລາ breaking chip ແລະ chip breaking cycle ສາມາດຖືກກໍານົດຢູ່ໃນການໂຕ້ຕອບ man-machine.
3.2. ພ້ອມກັບຟັງຊັນຍົກເຄື່ອງມື, ໄລຍະການຍົກເຄື່ອງມືສາມາດຕັ້ງຢູ່ໃນການໂຕ້ຕອບຂອງເຄື່ອງຈັກ. ເມື່ອເຖິງໄລຍະຫ່າງ, ເຄື່ອງມືໄດ້ຖືກຍົກຂຶ້ນຢ່າງໄວວາ, ຫຼັງຈາກນັ້ນຊິບໄດ້ຖືກຖິ້ມອອກໄປ, ແລະຫຼັງຈາກນັ້ນມັນຖືກສົ່ງຕໍ່ຢ່າງໄວວາໄປຫາຫນ້າດິນເຈາະແລະປ່ຽນອັດຕະໂນມັດເພື່ອເຮັດວຽກ.
3.3. ກ່ອງຄວບຄຸມການປະຕິບັດການສູນກາງແລະຫນ່ວຍງານທີ່ຖືດ້ວຍມືຮັບຮອງເອົາລະບົບຄວບຄຸມຕົວເລກແລະຖືກຕິດຕັ້ງດ້ວຍການໂຕ້ຕອບ USB ແລະຈໍສະແດງຜົນຜລຶກຂອງແຫຼວ LCD. ເພື່ອອໍານວຍຄວາມສະດວກໃນການຂຽນໂປລແກລມ, ການເກັບຮັກສາ, ການສະແດງຜົນແລະການສື່ສານ, ການໂຕ້ຕອບການດໍາເນີນງານມີຫນ້າທີ່ເຊັ່ນ: ການສົນທະນາກັບເຄື່ອງຈັກ, ການຊົດເຊີຍຄວາມຜິດພາດ, ແລະການແຈ້ງເຕືອນອັດຕະໂນມັດ.
3.4. ອຸປະກອນມີຫນ້າທີ່ສະແດງຕົວຢ່າງແລະກວດກາຄືນຕໍາແຫນ່ງຂຸມກ່ອນທີ່ຈະປຸງແຕ່ງ, ແລະການດໍາເນີນງານແມ່ນສະດວກຫຼາຍ.
4. ການຫລໍ່ລື່ນອັດຕະໂນມັດ
ຄູ່ທາງລົດໄຟຄູ່ມືເສັ້ນທີ່ມີຄວາມແມ່ນຍໍາຂອງເຄື່ອງຈັກ, ຄູ່ສະກູບານທີ່ມີຄວາມແມ່ນຍໍາແລະຄູ່ການເຄື່ອນໄຫວທີ່ມີຄວາມແມ່ນຍໍາສູງອື່ນໆແມ່ນມີລະບົບການຫລໍ່ລື່ນອັດຕະໂນມັດ. ປັ໊ມນໍ້າມັນຫລໍ່ລື່ນອັດຕະໂນມັດຈະສົ່ງນໍ້າມັນແຮງດັນ, ແລະຫ້ອງນໍ້າມັນເຄື່ອງຫຼໍ່ລື່ນຕາມປະລິມານຈະເຂົ້າສູ່ນໍ້າມັນ. ຫຼັງຈາກຫ້ອງນ້ໍາແມ່ນເຕັມໄປດ້ວຍນ້ໍາມັນ, ເມື່ອຄວາມກົດດັນຂອງລະບົບເພີ່ມຂຶ້ນເຖິງ 1.4-1.75Mpa, ສະຫຼັບຄວາມກົດດັນໃນລະບົບຖືກປິດ, ປັ໊ມຢຸດ, ແລະປ່ຽງ unloading unloads ໃນເວລາດຽວກັນ. ເມື່ອຄວາມກົດດັນຂອງນ້ໍາມັນຢູ່ໃນເສັ້ນທາງຫຼຸດລົງຕໍ່າກວ່າ 0.2Mpa, ເຄື່ອງຫລໍ່ລື່ນປະລິມານເລີ່ມຕື່ມໃສ່ຈຸດທີ່ຫລໍ່ລື່ນແລະສໍາເລັດການຕື່ມນ້ໍາມັນຫນຶ່ງ. ເນື່ອງຈາກການສະຫນອງນ້ໍາມັນທີ່ຖືກຕ້ອງຂອງຫົວສີດນ້ໍາມັນປະລິມານແລະການກວດສອບຄວາມດັນຂອງລະບົບ, ການສະຫນອງນ້ໍາມັນມີຄວາມຫນ້າເຊື່ອຖື, ຮັບປະກັນວ່າມີຮູບເງົານ້ໍາມັນຢູ່ເທິງຫນ້າຂອງແຕ່ລະຄູ່ kinematic, ຫຼຸດຜ່ອນ friction ແລະການສວມໃສ່, ແລະປ້ອງກັນຄວາມເສຍຫາຍຂອງ. ໂຄງສ້າງພາຍໃນທີ່ເກີດຈາກຄວາມຮ້ອນເກີນ. , ເພື່ອຮັບປະກັນຄວາມຖືກຕ້ອງແລະຊີວິດຂອງເຄື່ອງຈັກ. ເມື່ອປຽບທຽບກັບຄູ່ລົດໄຟຄູ່ມືເລື່ອນ, ຄູ່ລົດໄຟຄູ່ມືເສັ້ນມ້ວນທີ່ໃຊ້ໃນເຄື່ອງຈັກນີ້ມີຂໍ້ດີຫຼາຍ:
① ຄວາມອ່ອນໄຫວຂອງການເຄື່ອນໄຫວສູງ, ຄ່າສໍາປະສິດ friction ຂອງ rail ຄູ່ມືມ້ວນແມ່ນຂະຫນາດນ້ອຍ, ພຽງແຕ່ 0.0025-0.01, ແລະພະລັງງານການຂັບລົດແມ່ນຫຼຸດລົງຢ່າງຫຼວງຫຼາຍ, ເຊິ່ງເທົ່າກັບ 1 ຂອງເຄື່ອງຈັກທົ່ວໄປ. /10.
② ຄວາມແຕກຕ່າງລະຫວ່າງ friction ແບບເຄື່ອນໄຫວແລະ static ມີຂະຫນາດນ້ອຍຫຼາຍ, ແລະການປະຕິບັດການຕິດຕາມແມ່ນດີເລີດ, ນັ້ນແມ່ນ, ໄລຍະເວລາລະຫວ່າງສັນຍານການຂັບລົດແລະການດໍາເນີນການກົນຈັກແມ່ນສັ້ນທີ່ສຸດ, ເຊິ່ງສະດວກໃນການປັບປຸງຄວາມໄວຕອບສະຫນອງແລະຄວາມອ່ອນໄຫວຂອງ. ລະບົບການຄວບຄຸມຕົວເລກ.③ມັນເຫມາະສົມສໍາລັບການເຄື່ອນໄຫວເສັ້ນທີ່ມີຄວາມໄວສູງ, ແລະຄວາມໄວທັນທີທັນໃດຂອງມັນແມ່ນສູງກວ່າປະມານ 10 ເທົ່າຂອງລາງທາງການເລື່ອນ. ④ ມັນສາມາດຮັບຮູ້ການເຄື່ອນໄຫວ gapless ແລະປັບປຸງຄວາມເຂັ້ມງວດການເຄື່ອນໄຫວຂອງລະບົບກົນຈັກ. ⑤ຜະລິດໂດຍຜູ້ຜະລິດມືອາຊີບ, ມັນມີຄວາມແມ່ນຍໍາສູງ, versatility ດີແລະການບໍາລຸງຮັກສາງ່າຍ.
5. ສະພາບແວດລ້ອມການນໍາໃຊ້ເຄື່ອງຈັກ:
5.1. ຄວາມຕ້ອງການດ້ານສິ່ງແວດລ້ອມສໍາລັບການນໍາໃຊ້ອຸປະກອນ
ການຮັກສາລະດັບອຸນຫະພູມອາກາດລ້ອມຮອບຄົງທີ່ແມ່ນປັດໃຈສໍາຄັນສໍາລັບການເຄື່ອງຈັກທີ່ມີຄວາມແມ່ນຍໍາ.
(1) ຄວາມຕ້ອງການອຸນຫະພູມທີ່ມີຢູ່ແມ່ນ -10 ° C ຫາ 35 ° C, ໃນເວລາທີ່ອຸນຫະພູມລ້ອມຮອບແມ່ນ 20 ° C, ຄວາມຊຸ່ມຊື່ນຄວນຈະເປັນ 40% ຫາ 75%.
(2) ເພື່ອຮັກສາຄວາມຖືກຕ້ອງສະຖິຕິຂອງເຄື່ອງຢູ່ໃນລະດັບທີ່ກໍານົດໄວ້, ອຸນຫະພູມທີ່ເຫມາະສົມແມ່ນຈໍາເປັນຕ້ອງແມ່ນ 15 ° C ຫາ 25 ° C, ແລະຄວາມແຕກຕ່າງຂອງອຸນຫະພູມ.
ຕ້ອງບໍ່ເກີນ ±2°C/24ຊມ.
5.2 ແຮງດັນການສະຫນອງພະລັງງານ: 3-phase, 380V, ພາຍໃນຂອບເຂດຂອງຄວາມຜັນຜວນຂອງແຮງດັນໄຟຟ້າ ±10%, ຄວາມຖີ່ຂອງການສະຫນອງພະລັງງານ: 50HZ.
5.3 ຖ້າແຮງດັນໃນພື້ນທີ່ເຮັດວຽກບໍ່ຄົງທີ່, ເຄື່ອງຄວນຕິດຕັ້ງເຄື່ອງສະຫນອງພະລັງງານທີ່ມີຄວາມຫມັ້ນຄົງເພື່ອຮັບປະກັນການເຮັດວຽກປົກກະຕິຂອງເຄື່ອງຈັກ.
5.4 ເຄື່ອງຈັກຄວນມີສາຍດິນທີ່ເຊື່ອຖືໄດ້: ສາຍດິນເປັນສາຍທອງແດງ, ເສັ້ນຜ່າສູນກາງຂອງສາຍບໍ່ຄວນຫນ້ອຍກວ່າ 10mm², ແລະຄວາມຕ້ານທານຂອງດິນມີຂະຫນາດນ້ອຍເປັນ 4 ohms.
5.5 ເພື່ອຮັບປະກັນການເຮັດວຽກປົກກະຕິຂອງອຸປະກອນ, ຖ້າອາກາດບີບອັດຂອງແຫຼ່ງອາກາດບໍ່ສາມາດຕອບສະຫນອງຄວາມຕ້ອງການຂອງແຫຼ່ງອາກາດ, ມັນຄວນຈະຖືກຕິດຕັ້ງໃສ່ເຄື່ອງ.
ຕື່ມຊຸດຂອງອຸປະກອນເຮັດຄວາມສະອາດແຫຼ່ງອາກາດ (dehumidification, degreasing, filtering) ກ່ອນອາກາດ.
5.6 ຮັກສາອຸປະກອນໃຫ້ຫ່າງຈາກແສງແດດໂດຍກົງ, ການສັ່ນສະເທືອນແລະຄວາມຮ້ອນ, ເຄື່ອງກໍາເນີດຄວາມຖີ່ສູງ, ເຄື່ອງເຊື່ອມໄຟຟ້າ, ແລະອື່ນໆ, ເພື່ອຫຼີກເວັ້ນການຄວາມລົ້ມເຫຼວຂອງການຜະລິດເຄື່ອງຈັກຫຼືການສູນເສຍຄວາມຖືກຕ້ອງຂອງເຄື່ອງຈັກ.
6. ຕົວກໍານົດການດ້ານວິຊາການ
| ຕົວແບບ | 1601 | |
| ຂະຫນາດ workpiece ການປຸງແຕ່ງ | ຍາວ × ກວ້າງ × ສູງ (ມມ) | 16000×1000×1500 |
| ອາຫານສູງສຸດຂອງເຄື່ອງຈັກ | ກວ້າງ (ມມ) | 1300 |
| ຂະຫນາດໂຕະເຮັດວຽກ | ຍາວ X ກວ້າງ (ມມ) | 16000*1000 |
| ການເດີນທາງຖັນ | ຖັນເລື່ອນໄປມາ (ມມ) | 1600 |
| Spindle ຂຶ້ນແລະລົງ | ການເດີນທາງຂຶ້ນ ແລະ ລົງ (ມມ) | 1500 |
| ຄວາມສູງຈາກສູນກາງ spindle ຫາຍົນຕາຕະລາງ | 100-1600mm | |
| spindle ມີຄວາມເຂັ້ມແຂງສູງແນວນອນ ຫົວພະລັງງານຫນຶ່ງສອງ | ປະລິມານ (2) | 2 |
| Spindle taper | BT50 | |
| Broach | broaching ອັດຕະໂນມັດ, ການປ່ຽນແປງເຄື່ອງມືຄູ່ມື | |
| ເສັ້ນຜ່າສູນກາງເຄື່ອງຕັດ (ມມ) | ≤Φ200 | |
| ເສັ້ນຜ່າສູນກາງການປາດ (ມມ) | M3-M30 | |
| ຄວາມໄວ spindle (r/min) | 30-3000 | |
| ພະລັງງານມໍເຕີ spindle Servo (kw) | 30*2 | |
|
| ໄລຍະການເດີນທາງຊ້າຍແລະຂວາລະຫວ່າງສອງປາຍ spindle | 400-1600mm |
| ການເດີນທາງຊ້າຍແລະຂວາຂອງຖັນຄູ່ (ມມ) | ໜ່ວຍລະ 600 | |
| ເຄື່ອງເຮັດຄວາມເຢັນ | ຄວາມເຢັນພາຍໃນ, ຄວາມເຢັນພາຍນອກ | |
| ຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງສອງທິດທາງ | 300 ມມ | ±0.032 |
| ຄວາມຖືກຕ້ອງຂອງການຈັດຕຳແໜ່ງຊ້ຳສອງທິດທາງ | 300 ມມ | ±0.025 |
| ຂະໜາດເຄື່ອງ | ຍາວ × ກວ້າງ × ສູງ (ມມ) | ອີງຕາມຮູບແຕ້ມ (ຖ້າມີການປ່ຽນແປງໃນຂະບວນການອອກແບບ, ພວກເຮົາຈະແຈ້ງໃຫ້ທ່ານຮູ້) |
| ນ້ຳໜັກລວມ (ຕ) | 72 ທ | |