BOSM -6025 ເຄື່ອງເຈາະຫົວຂັດຂັດ
1. ອຸປະກອນໃຊ້:
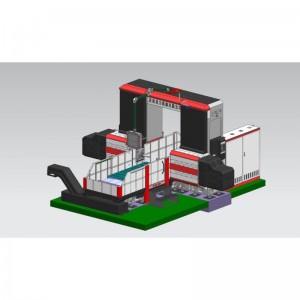
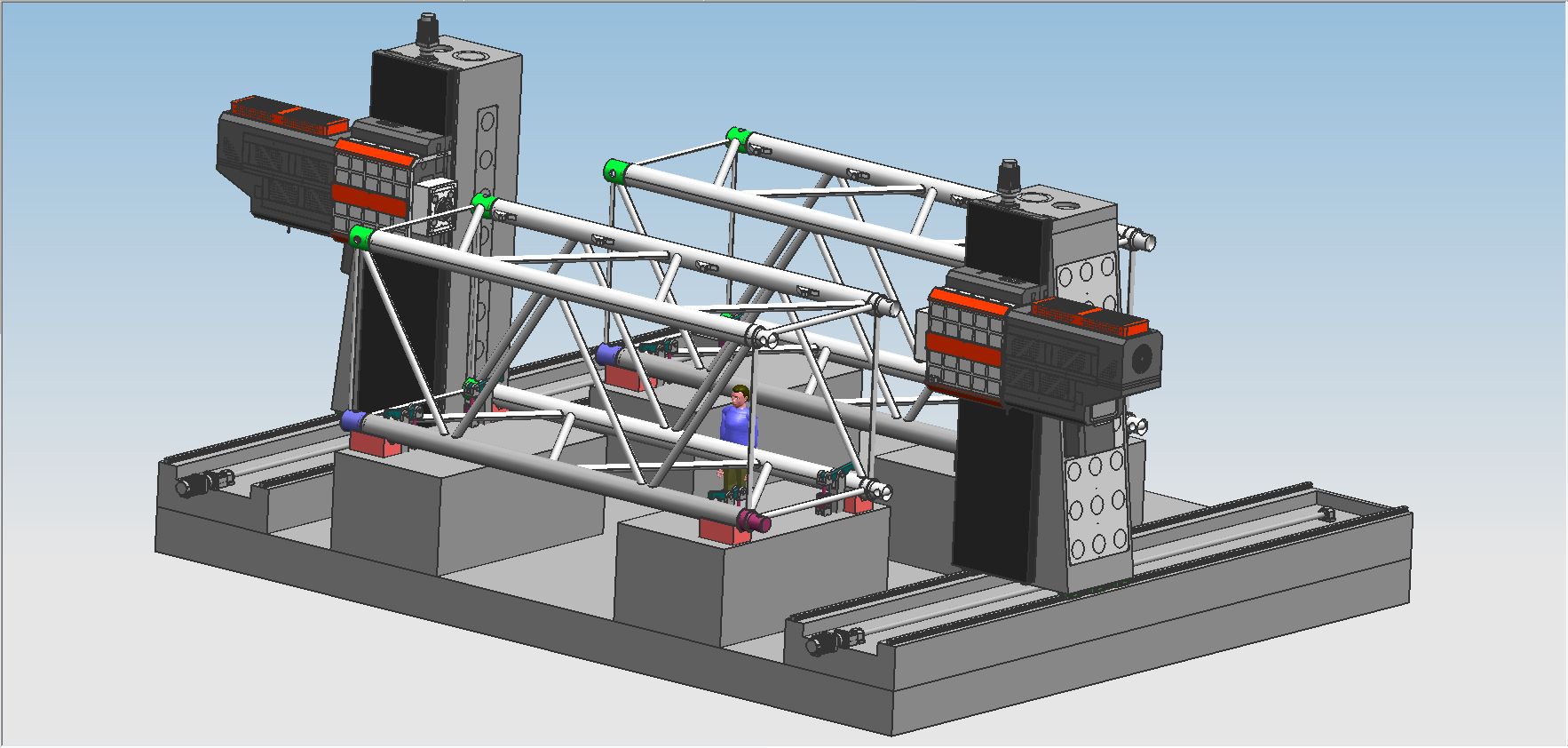
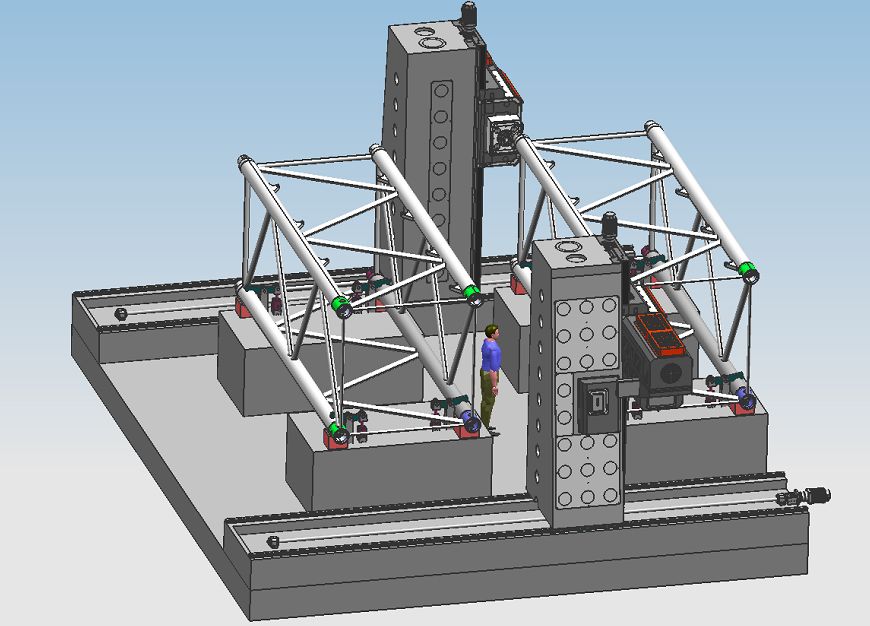
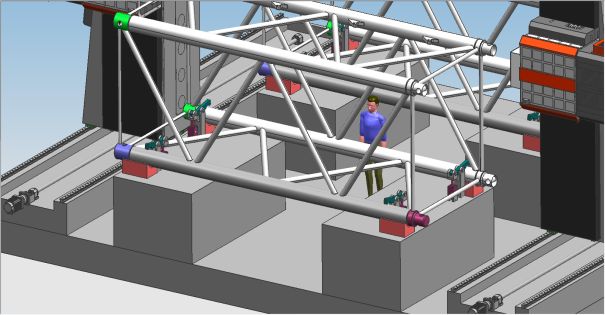
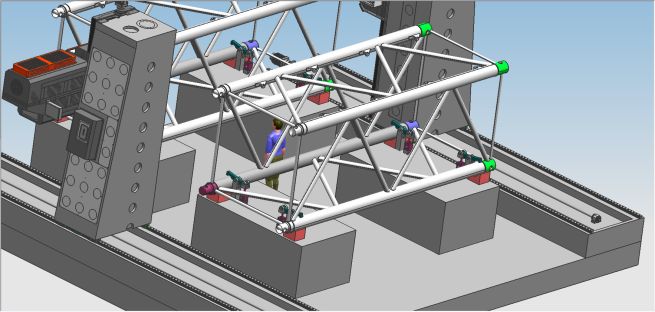
BOSM-6025 double-station, CNC vertical column movable double-column head-to-head boring and milling machine is a special machine machine tool for symmetrical workpieces of construction machinery.ເຄື່ອງມືເຄື່ອງຈັກໄດ້ຖືກຕິດຕັ້ງດ້ວຍຖັນທີ່ສາມາດເຄື່ອນທີ່ພິເສດແລະສອງຊຸດຂອງ rams ອອກຕາມລວງນອນ, ເຊິ່ງສາມາດຮັບຮູ້ການເຈາະ, milling, ເຈາະແລະການປຸງແຕ່ງອື່ນໆຂອງ workpiece ພາຍໃນຂອບເຂດເສັ້ນເລືອດຕັນໃນປະສິດທິພາບ, workpiece ສາມາດໄດ້ຮັບການປຸງແຕ່ງໃນສະຖານທີ່ໃນເວລາດຽວ (ບໍ່ຈໍາເປັນຕ້ອງ. ສໍາລັບການຍຶດຮອງ), ຄວາມໄວໃນການໂຫຼດແລະ unloading ໄວ, ຄວາມໄວຕໍາແຫນ່ງໄວ, ຄວາມຖືກຕ້ອງຂອງການປຸງແຕ່ງສູງແລະປະສິດທິພາບການປຸງແຕ່ງສູງ.
2. ໂຄງສ້າງອຸປະກອນ:
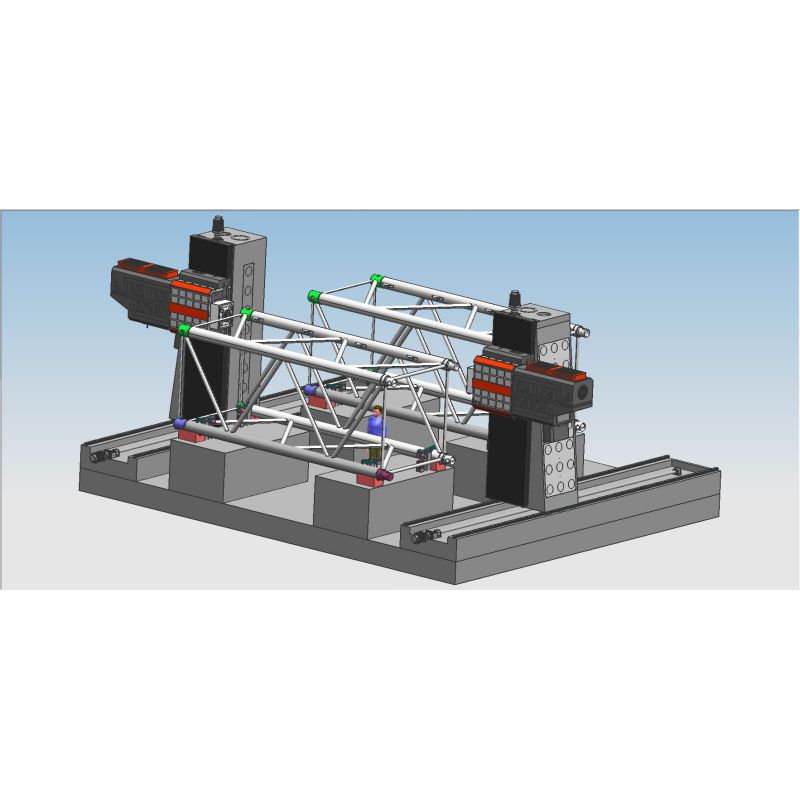
2.1. ອົງປະກອບຕົ້ນຕໍຂອງເຄື່ອງມືເຄື່ອງຈັກ
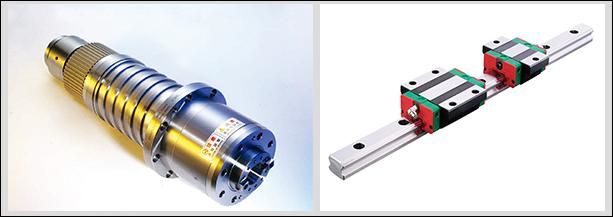
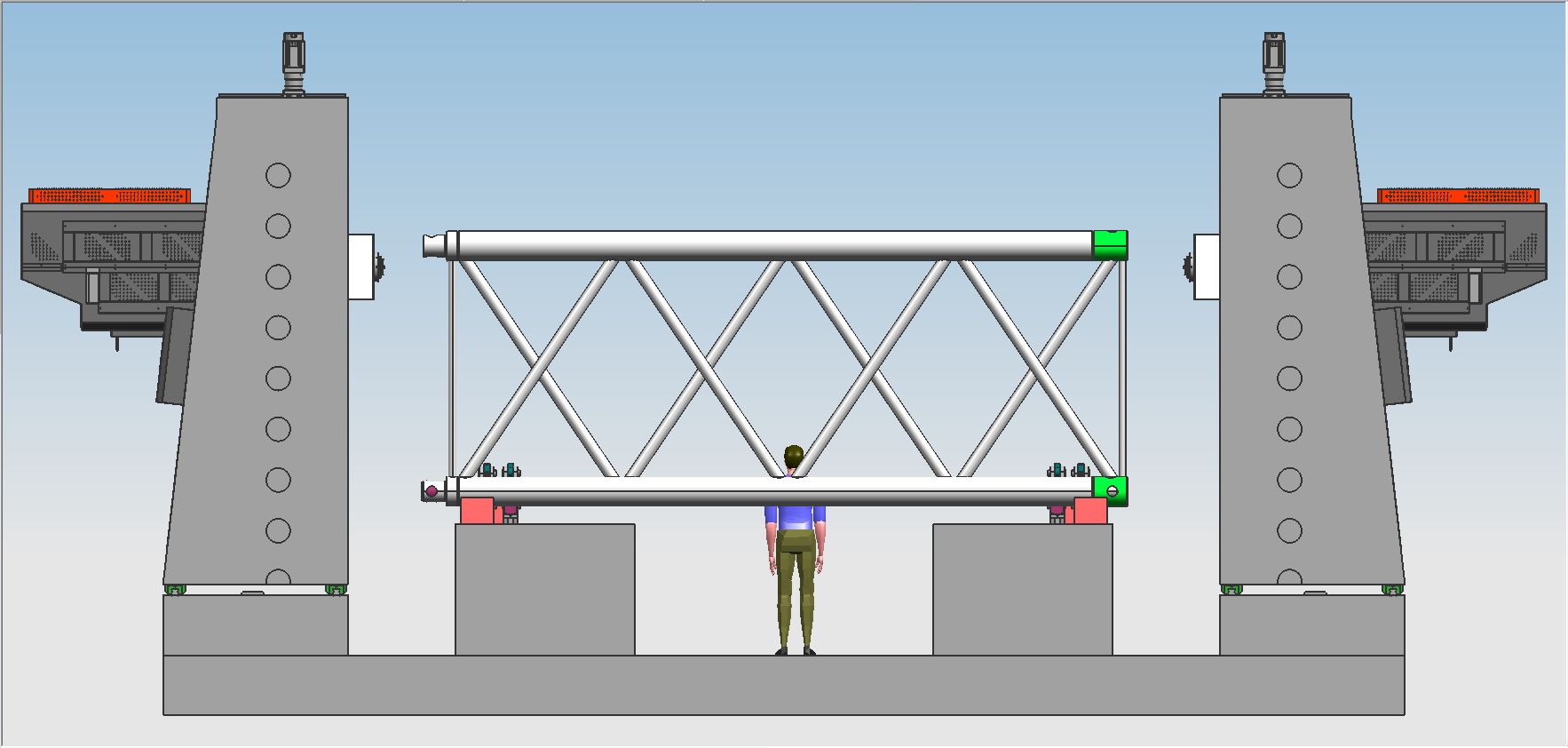
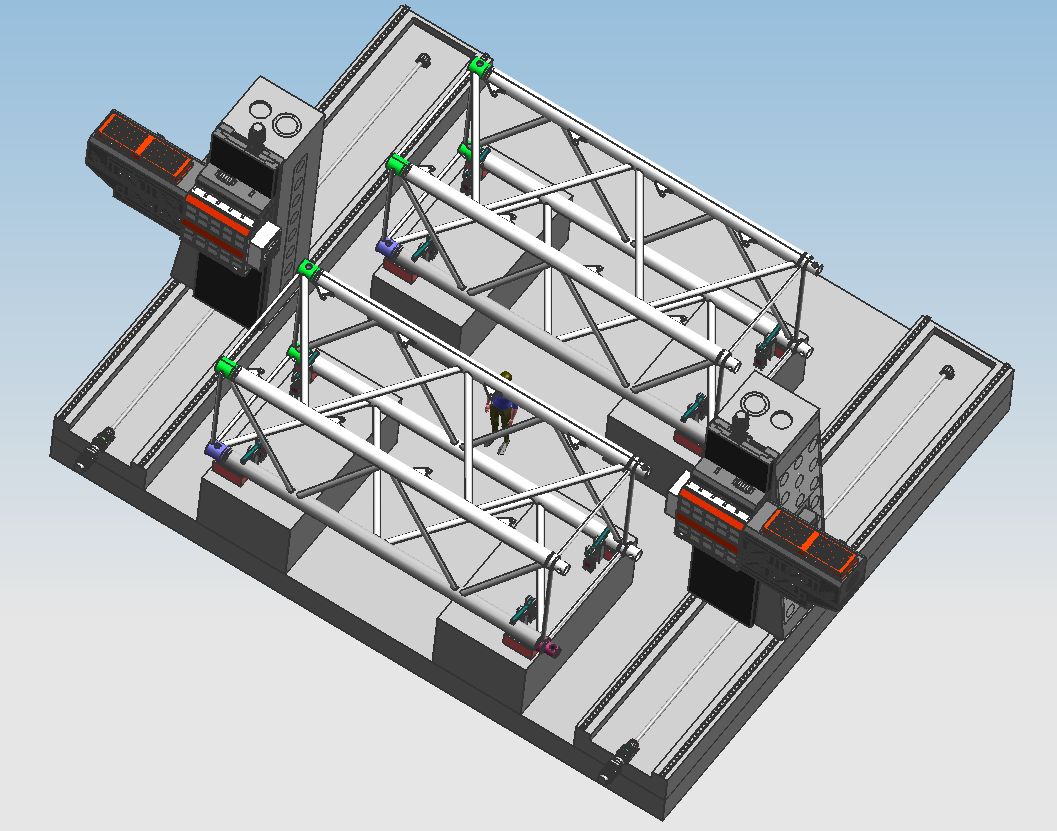
ຕຽງນອນ, ບ່ອນນັ່ງເຮັດວຽກ, ຖັນຊ້າຍແລະຂວາ, beams, saddles, rams ແລະພາກສ່ວນຂະຫນາດໃຫຍ່ອື່ນໆທັງຫມົດແມ່ນເຮັດດ້ວຍດິນຊາຍ molding, ເຫຼັກສີຂີ້ເຖົ່າສູງ 250 casting, annealed ໃນຂຸມດິນຊາຍຮ້ອນ → vibration aging → furnace ຮ້ອນ annealing → vibration aging → ເຄື່ອງຈັກ rough → Vibration aging → furnace ຮ້ອນ annealing → vibration aging →ສໍາເລັດຮູບ, ກໍາຈັດຄວາມກົດດັນທາງລົບຂອງພາກສ່ວນຢ່າງສົມບູນ, ແລະຮັກສາການປະຕິບັດຂອງພາກສ່ວນທີ່ຫມັ້ນຄົງ.ເຄື່ອງມືເຄື່ອງມີຫນ້າທີ່ເຊັ່ນ: milling, boring, ເຈາະ, countersinking, tapping, ແລະອື່ນໆ, ແລະວິທີການເຮັດຄວາມເຢັນຂອງເຄື່ອງມືແມ່ນການເຮັດຄວາມເຢັນຈາກພາຍນອກ, ເຄື່ອງມືເຄື່ອງມືມີ 6 feed axes, ທີ່ສາມາດຮັບຮູ້ການເຊື່ອມຕໍ່ 4 ແກນແລະ 6 ແກນດຽວ. ການກະທຳ.ມີ 2 ຫົວພະລັງງານ.ທິດທາງແກນຂອງເຄື່ອງມືເຄື່ອງຈັກແລະຫົວພະລັງງານແມ່ນສະແດງຢູ່ໃນຮູບຂ້າງລຸ່ມນີ້.
2. 2ໂຄງສ້າງຕົ້ນຕໍຂອງພາກສ່ວນອາຫານການສົ່ງຜ່ານ axial
2.2.1 X 1/X2 axis: ຖັນ reciprocates ຕາມລວງຍາວຕາມເສັ້ນທາງນໍາພາຂອງຕຽງຄົງທີ່.
ລະບົບສາຍສົ່ງແກນ X: ມໍເຕີ AC servo ແລະເຄື່ອງຫຼຸດຜ່ອນດາວເຄາະທີ່ມີຄວາມແມ່ນຍໍາສູງຖືກນໍາໃຊ້ເພື່ອຂັບລົດສອງຖັນໂດຍຜ່ານການສົ່ງບານສະກູເພື່ອຮັບຮູ້ການເຄື່ອນໄຫວເສັ້ນຊື່ຂອງແກນ X.
ຮູບແບບທາງລົດໄຟຄູ່ມື: ວາງສອງລາງລົດໄຟຄູ່ມືເສັ້ນທີ່ມີຄວາມແມ່ນຍໍາສູງ.
2.2.2 ແກນ Y1: ຫົວພະລັງງານແລະ ram ໄດ້ຖືກຕິດຕັ້ງໃນແນວຕັ້ງຢູ່ດ້ານຫນ້າຂອງຖັນ, ແລະ reciprocate ຊ້າຍແລະຂວາຕາມເສັ້ນທາງນໍາພາຂອງຖັນ.
ການສົ່ງສັນຍານ Y1-axis: AC servo motor ຖືກນໍາໃຊ້ເພື່ອຂັບ screw ບານເພື່ອຂັບ saddle ຍ້າຍ, ແລະຮັບຮູ້ການເຄື່ອນໄຫວເສັ້ນ Y1- ແກນ.
ຮູບແບບລົດໄຟຄູ່ມື: 4 ເສັ້ນຄູ່ມືເສັ້ນ + ຮາດ rail square ram ລວມກັນ.
2.2.3 ແກນ Y2: ram ທີສອງຂອງຫົວພະລັງງານຖືກຕິດຕັ້ງໃນແນວຕັ້ງຢູ່ດ້ານຫນ້າຂອງຖັນ, ແລະ reciprocates ຊ້າຍແລະຂວາຕາມເສັ້ນທາງນໍາພາຂອງຖັນ.
ການສົ່ງສັນຍານ Y2-axis: AC servo motor ຖືກນໍາໃຊ້ເພື່ອຂັບ screw ບານເພື່ອຂັບ saddle ຍ້າຍ, ແລະຮັບຮູ້ການເຄື່ອນໄຫວເສັ້ນ Y2-ແກນ.
ຮູບແບບລົດໄຟຄູ່ມື: 4 ເສັ້ນຄູ່ມືເສັ້ນ + ຮາດ rail square ram ລວມກັນ.
2.2.4 ແກນ Z1: saddle ຫົວພະລັງງານຖືກຕິດຕັ້ງໃນແນວຕັ້ງຢູ່ດ້ານຫນ້າຂອງຖັນຂວາ, ແລະ reciprocates ຂຶ້ນແລະລົງຕາມທາງລົດໄຟນໍາພາຖັນ.
ລະບົບສາຍສົ່ງ Z1-axis: AC servo motor ແລະ reducer planetary ຄວາມແມ່ນຍໍາສູງຖືກນໍາໃຊ້ເພື່ອຂັບ ram ຍ້າຍຜ່ານສະກູບານເພື່ອຮັບຮູ້ການເຄື່ອນໄຫວເສັ້ນ Z1-axis.
ຮູບແບບລົດໄຟຄູ່ມື: 2 ລາງລົດໄຟຄູ່ມືເສັ້ນ.
2.2.5 ແກນ Z2: saddle ຫົວສະໄລ້ພະລັງງານຖືກຕິດຕັ້ງໃນແນວຕັ້ງຢູ່ດ້ານຫນ້າຂອງຖັນຂວາ, ແລະ reciprocates ຂຶ້ນແລະລົງຕາມທາງລົດໄຟນໍາພາຖັນ.
ລະບົບສາຍສົ່ງ Z1-axis: AC servo motor ບວກກັບ planetary reducer ຄວາມແມ່ນຍໍາສູງຖືກນໍາໃຊ້ເພື່ອຂັບ ram ເພື່ອຍ້າຍຜ່ານສະກູບານເພື່ອຮັບຮູ້ການເຄື່ອນໄຫວເສັ້ນ Z2-axis.
ຮູບແບບລົດໄຟຄູ່ມື: 2 ລາງລົດໄຟຄູ່ມືເສັ້ນ
ຫົວພະລັງງານເຈາະ ແລະ milling (ລວມທັງຫົວພະລັງງານ 1 ແລະ 2) ເປັນ ram ສີ່ຫລ່ຽມປະສົມ, ແລະທິດທາງການເຄື່ອນຍ້າຍແມ່ນນໍາພາໂດຍ 4 linear roller guide rails.ໄດຣຟ໌ໃຊ້ມໍເຕີ AC servo ເພື່ອຂັບລົດຄູ່ສະກູບານທີ່ມີຄວາມແມ່ນຍໍາ.ເຄື່ອງໄດ້ຖືກຕິດຕັ້ງດ້ວຍແຖບການດຸ່ນດ່ຽງໄນໂຕຣເຈນ., ຫຼຸດຜ່ອນຄວາມອາດສາມາດຂອງແບ້ຂອງຫົວເຄື່ອງຈັກໃນສະກູແລະມໍເຕີ servo.ມໍເຕີ Z-axis ມີຫນ້າທີ່ຫ້າມລໍ້ອັດຕະໂນມັດ.ໃນກໍລະນີທີ່ພະລັງງານລົ້ມເຫຼວ, ຫ້າມລໍ້ອັດຕະໂນມັດຈະຖື shaft motor ແຫນ້ນເພື່ອໃຫ້ມັນບໍ່ສາມາດຫມຸນໄດ້.ໃນເວລາທີ່ເຮັດວຽກ, ໃນເວລາທີ່ເຈາະບໍ່ແຕະ workpiece ໄດ້, ມັນຈະອາຫານຢ່າງໄວວາ;ເມື່ອເຈາະສຳຜັດກັບເຄື່ອງເຮັດວຽກ, ມັນຈະສະຫຼັບໄປຫາອາຫານທີ່ເຮັດວຽກໂດຍອັດຕະໂນມັດ.ໃນເວລາທີ່ເຈາະເຈາະເຂົ້າໄປໃນ workpiece ໄດ້, ມັນຈະສະຫຼັບອັດຕະໂນມັດກັບ rewind ໄວ;ເມື່ອປາຍເຈາະອອກຈາກ workpiece ແລະໄປເຖິງຕໍາແຫນ່ງທີ່ກໍານົດໄວ້, ມັນຈະຍ້າຍໄປຕໍາແຫນ່ງຂຸມຕໍ່ໄປເພື່ອຮັບຮູ້ການໄຫຼວຽນຂອງອັດຕະໂນມັດ.ແລະມັນສາມາດຮັບຮູ້ຫນ້າທີ່ຂອງການເຈາະຮູຕາບອດ, milling, chamfering, chip breaking, chip ອັດຕະໂນມັດ, ແລະອື່ນໆ, ເຊິ່ງປັບປຸງຜົນຜະລິດແຮງງານ.


ຫົວພະລັງງານ ram ສີ່ຫຼ່ຽມ 500 ມມ stroke ປະສົມໃຊ້ເສັ້ນທິດທາງແທນການແຊກແບບດັ້ງເດີມເພື່ອປັບປຸງຄວາມຖືກຕ້ອງຂອງການຊີ້ນໍາຢ່າງຫຼວງຫຼາຍໃນຂະນະທີ່ຮັກສາຄວາມເຂັ້ມງວດຂອງລໍາສີ່ຫຼ່ຽມມົນທົນ.
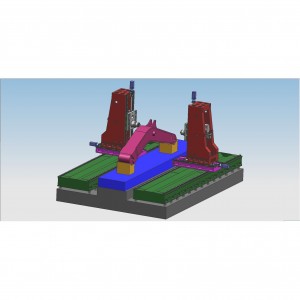
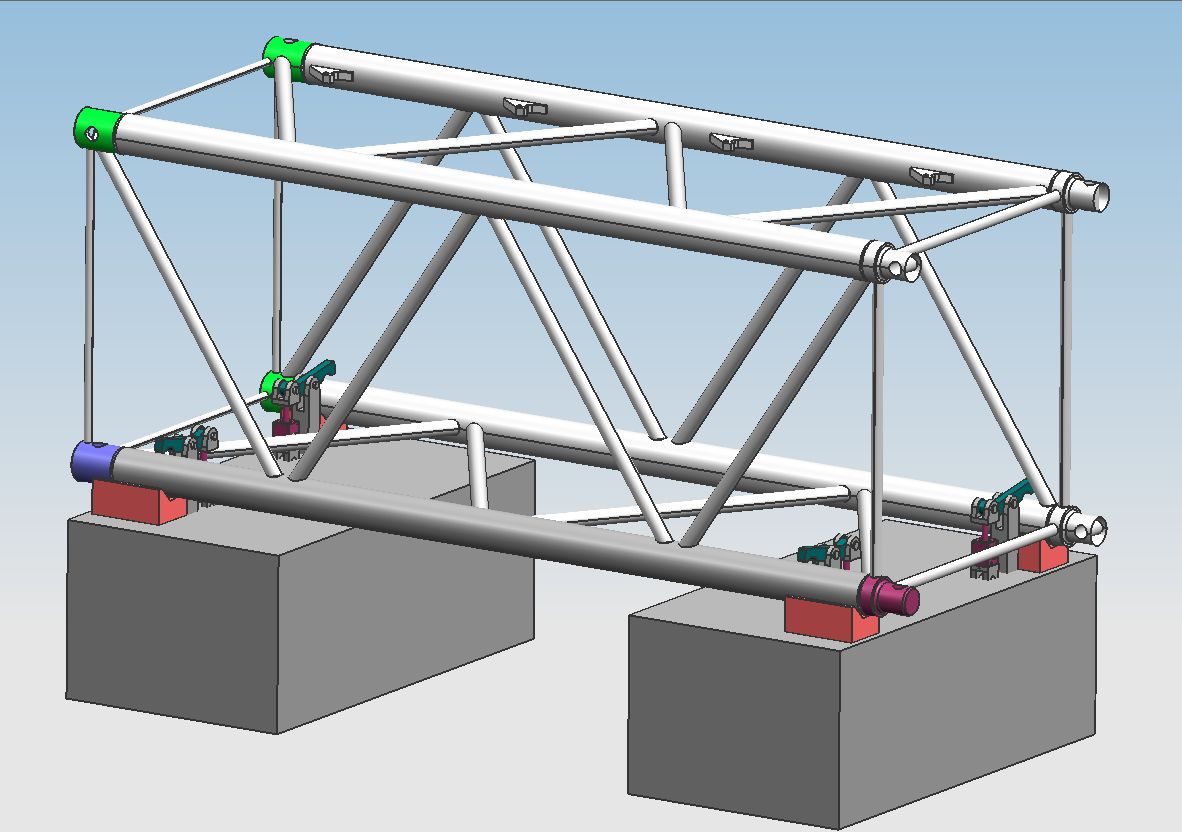
2.3. ການທໍາງານຂອງແຫນ້ນໄຮໂດຼລິກ workpiece
2.4ການຖອດຊິບແລະການເຮັດຄວາມເຢັນ
ມີທໍ່ລໍາລຽງຊິບຕ່ອງໂສ້ກ້ຽວວຽນແລະຮາບພຽງຢູ່ສອງດ້ານຂ້າງລຸ່ມຂອງບ່ອນເຮັດວຽກ, ແລະຊິບສາມາດຖືກຂັບໄລ່ອັດຕະໂນມັດໄປສູ່ທໍ່ລໍາລຽງຊິບໃນຕອນທ້າຍໂດຍຜ່ານສອງຂັ້ນຕອນຂອງແຜ່ນມ້ວນແລະລະບົບຕ່ອງໂສ້ເພື່ອຮັບຮູ້ການຜະລິດອາລະຍະທໍາ.ມີປັ໊ມເຮັດຄວາມເຢັນຢູ່ໃນຖັງ coolant ຂອງລໍາລຽງຊິບ, ເຊິ່ງສາມາດນໍາໃຊ້ສໍາລັບການເຮັດຄວາມເຢັນພາຍນອກຂອງເຄື່ອງມືເພື່ອຮັບປະກັນປະສິດທິພາບແລະຊີວິດການບໍລິການຂອງເຄື່ອງມື, ແລະ coolant ສາມາດນໍາມາໃຊ້ໃຫມ່.
3. ລະບົບຄວບຄຸມຕົວເລກດິຈິຕອນເຕັມຮູບແບບ:
3.1.ດ້ວຍການທໍາງານຂອງ chip breaking, ເວລາ breaking chip ແລະ chip breaking cycle ສາມາດຖືກກໍານົດຢູ່ໃນການໂຕ້ຕອບ man-machine.
3.2.ດ້ວຍການທໍາງານຂອງການຍົກເຄື່ອງມື, ໄລຍະຫ່າງຍົກເຄື່ອງມືສາມາດໄດ້ຮັບການຕັ້ງຢູ່ໃນການໂຕ້ຕອບຂອງຜູ້ຊາຍເຄື່ອງ.ເມື່ອການປຸງແຕ່ງມາຮອດໄລຍະນີ້, ເຄື່ອງມືຈະຖືກຍົກຂຶ້ນຢ່າງໄວວາ, ຫຼັງຈາກນັ້ນຊິບຈະຖືກຖິ້ມ, ແລະຫຼັງຈາກນັ້ນໄວໄປຫາຫນ້າດິນເຈາະແລະປ່ຽນໄປເຮັດວຽກໂດຍອັດຕະໂນມັດ.
3.3.ກ່ອງຄວບຄຸມການປະຕິບັດການສູນກາງແລະຫນ່ວຍງານ handheld ຮັບຮອງເອົາລະບົບການຄວບຄຸມຕົວເລກແລະອຸປະກອນທີ່ມີການໂຕ້ຕອບ USB ແລະຈໍສະແດງຜົນຜລຶກຂອງແຫຼວ LCD.ເພື່ອອໍານວຍຄວາມສະດວກໃນການຂຽນໂປລແກລມ, ການເກັບຮັກສາ, ການສະແດງຜົນແລະການສື່ສານ, ການໂຕ້ຕອບການດໍາເນີນງານມີຫນ້າທີ່ເຊັ່ນ: ການສົນທະນາກັບເຄື່ອງຈັກ, ການຊົດເຊີຍຄວາມຜິດພາດ, ແລະການແຈ້ງເຕືອນອັດຕະໂນມັດ.
3.4.ອຸປະກອນມີຫນ້າທີ່ສະແດງຕົວຢ່າງແລະກວດກາຄືນຕໍາແຫນ່ງຂຸມກ່ອນທີ່ຈະປຸງແຕ່ງ, ແລະການດໍາເນີນງານແມ່ນສະດວກຫຼາຍ.
4.ການຫລໍ່ລື່ນອັດຕະໂນມັດ
ເຄື່ອງມືເຄື່ອງຈັກແມ່ນຄູ່ຄູ່ທາງລົດໄຟຄູ່ມືເສັ້ນ, ຄູ່ສະກູບານທີ່ມີຄວາມແມ່ນຍໍາແລະຄູ່ການເຄື່ອນໄຫວທີ່ມີຄວາມແມ່ນຍໍາສູງອື່ນໆແມ່ນມີການຕິດຕັ້ງລະບົບ lubrication ອັດຕະໂນມັດ.ປັ໊ມນໍ້າມັນຫລໍ່ລື່ນອັດຕະໂນມັດຈະສົ່ງນໍ້າມັນແຮງດັນ, ແລະຫ້ອງນໍ້າມັນເຄື່ອງຫຼໍ່ລື່ນຕາມປະລິມານຈະເຂົ້າສູ່ນໍ້າມັນ.ຫຼັງຈາກຫ້ອງນ້ໍາແມ່ນເຕັມໄປດ້ວຍນ້ໍາມັນ, ເມື່ອຄວາມກົດດັນຂອງລະບົບເພີ່ມຂຶ້ນເຖິງ 1.4-1.75Mpa, ສະຫຼັບຄວາມກົດດັນໃນລະບົບຖືກປິດ, ປັ໊ມຢຸດ, ແລະປ່ຽງ unloading unloads ໃນເວລາດຽວກັນ.ເມື່ອຄວາມກົດດັນຂອງນ້ໍາມັນຢູ່ໃນເສັ້ນທາງຫຼຸດລົງຕໍ່າກວ່າ 0.2Mpa, ເຄື່ອງຫລໍ່ລື່ນປະລິມານເລີ່ມຕື່ມໃສ່ຈຸດທີ່ຫລໍ່ລື່ນແລະສໍາເລັດການຕື່ມນ້ໍາມັນຫນຶ່ງ.ເນື່ອງຈາກການສະຫນອງນ້ໍາມັນທີ່ຖືກຕ້ອງຂອງຫົວສີດນ້ໍາມັນປະລິມານແລະການກວດສອບຄວາມດັນຂອງລະບົບ, ການສະຫນອງນ້ໍາມັນມີຄວາມຫນ້າເຊື່ອຖື, ຮັບປະກັນວ່າມີຮູບເງົານ້ໍາມັນຢູ່ເທິງຫນ້າຂອງແຕ່ລະຄູ່ kinematic, ຫຼຸດຜ່ອນ friction ແລະການສວມໃສ່, ແລະປ້ອງກັນຄວາມເສຍຫາຍຂອງ. ໂຄງສ້າງພາຍໃນທີ່ເກີດຈາກຄວາມຮ້ອນເກີນ, ເພື່ອຮັບປະກັນຄວາມຖືກຕ້ອງແລະຊີວິດຂອງເຄື່ອງມືເຄື່ອງຈັກ.ເມື່ອປຽບທຽບກັບຄູ່ລົດໄຟຄູ່ມືເລື່ອນ, ຄູ່ລົດໄຟຄູ່ມືເສັ້ນມ້ວນທີ່ໃຊ້ໃນເຄື່ອງມືເຄື່ອງຈັກນີ້ມີຂໍ້ດີຫຼາຍ:
① ຄວາມອ່ອນໄຫວຂອງການເຄື່ອນໄຫວສູງ, ຄ່າສໍາປະສິດ friction ຂອງ rail ຄູ່ມືມ້ວນແມ່ນຂະຫນາດນ້ອຍ, ພຽງແຕ່ 0.0025-0.01, ແລະພະລັງງານການຂັບລົດແມ່ນຫຼຸດລົງຢ່າງຫຼວງຫຼາຍ, ເຊິ່ງເທົ່າກັບ 1 ຂອງເຄື່ອງຈັກທົ່ວໄປ./10.② ຄວາມແຕກຕ່າງລະຫວ່າງ friction ແບບເຄື່ອນໄຫວແລະ static ມີຂະຫນາດນ້ອຍຫຼາຍ, ແລະການປະຕິບັດການຕິດຕາມແມ່ນດີເລີດ, ນັ້ນແມ່ນ, ໄລຍະເວລາລະຫວ່າງສັນຍານການຂັບລົດແລະການດໍາເນີນການກົນຈັກແມ່ນສັ້ນທີ່ສຸດ, ເຊິ່ງສະດວກໃນການປັບປຸງຄວາມໄວຕອບສະຫນອງແລະຄວາມອ່ອນໄຫວຂອງ. ລະບົບການຄວບຄຸມຕົວເລກ.
③ມັນເຫມາະສົມສໍາລັບການເຄື່ອນໄຫວເສັ້ນທີ່ມີຄວາມໄວສູງ, ແລະຄວາມໄວທັນທີທັນໃດຂອງມັນແມ່ນສູງກວ່າປະມານ 10 ເທົ່າຂອງການນໍາທາງເລື່ອນ.④ ມັນສາມາດຮັບຮູ້ການເຄື່ອນໄຫວ gapless ແລະປັບປຸງຄວາມເຂັ້ມງວດການເຄື່ອນໄຫວຂອງລະບົບກົນຈັກ.⑤ຜະລິດໂດຍຜູ້ຜະລິດມືອາຊີບ, ມັນມີຄວາມແມ່ນຍໍາສູງ, versatility ດີແລະການບໍາລຸງຮັກສາງ່າຍ.
5.ການກວດແກນເລເຊີ:
ແຕ່ລະເຄື່ອງຂອງ Bosman ໄດ້ຖືກປັບໂດຍ laser interferometer ຂອງບໍລິສັດ RENISHAW ໃນສະຫະລາຊະອານາຈັກເພື່ອກວດກາຢ່າງຖືກຕ້ອງແລະຊົດເຊີຍຄວາມຜິດພາດຂອງ pitch, backlash, ຄວາມຖືກຕ້ອງຂອງຕໍາແຫນ່ງ, ຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງຊ້ໍາອີກ, ແລະອື່ນໆ, ເພື່ອຮັບປະກັນຄວາມຫມັ້ນຄົງແບບເຄື່ອນໄຫວ, ສະຖຽນລະພາບ static ແລະຄວາມຖືກຕ້ອງຂອງການປຸງແຕ່ງ. ເຄື່ອງ.ການກວດສອບ Ballbar ແຕ່ລະເຄື່ອງຈັກໃຊ້ ballbar ຈາກບໍລິສັດ RENISHAW ຂອງອັງກິດເພື່ອປັບຄວາມຖືກຕ້ອງຂອງວົງກົມທີ່ແທ້ຈິງແລະຄວາມຖືກຕ້ອງທາງເລຂາຄະນິດຂອງເຄື່ອງຈັກ, ແລະດໍາເນີນການທົດລອງຕັດຮູບວົງມົນໃນເວລາດຽວກັນເພື່ອຮັບປະກັນຄວາມຖືກຕ້ອງຂອງເຄື່ອງຈັກ 3D ແລະຄວາມຖືກຕ້ອງຂອງວົງກົມ.


6.ສະພາບແວດລ້ອມເຄື່ອງມືເຄື່ອງ:
6.1.ຄວາມຕ້ອງການສະພາບແວດລ້ອມການນໍາໃຊ້ອຸປະກອນ
ການຮັກສາລະດັບອຸນຫະພູມອາກາດລ້ອມຮອບຄົງທີ່ແມ່ນປັດໃຈສໍາຄັນສໍາລັບການເຄື່ອງຈັກທີ່ມີຄວາມແມ່ນຍໍາ.
(1) ຄວາມຕ້ອງການອຸນຫະພູມອາກາດລ້ອມຮອບທີ່ສາມາດໃຊ້ໄດ້ -10 ℃ ~ 35 ℃, ໃນເວລາທີ່ອຸນຫະພູມອາກາດລ້ອມຮອບແມ່ນ 20 ℃, ຄວາມຊຸ່ມຊື່ນຄວນຈະເປັນ 40 ~ 75%.
(2) ເພື່ອຮັກສາຄວາມຖືກຕ້ອງ static ຂອງເຄື່ອງມືໃນລະດັບທີ່ກໍານົດໄວ້, ອຸນຫະພູມທີ່ດີທີ່ສຸດຕ້ອງການ 15 ° C ຫາ 25 ° C, ແລະຄວາມແຕກຕ່າງຂອງອຸນຫະພູມ.
ຕ້ອງບໍ່ເກີນ ±2°C/24ຊມ.
6.1.2.ແຮງດັນການສະຫນອງພະລັງງານ: 3 ໄລຍະ, 380V, ພາຍໃນຂອບເຂດຂອງ ± 10% ການເຫນັງຕີງຂອງແຮງດັນ, ຄວາມຖີ່ຂອງການສະຫນອງພະລັງງານ: 50HZ.
6.1.3.ຖ້າແຮງດັນໄຟຟ້າໃນພື້ນທີ່ຂອງການນໍາໃຊ້ແມ່ນບໍ່ຫມັ້ນຄົງ, ເຄື່ອງມືຂອງເຄື່ອງຈັກຄວນໄດ້ຮັບການຕິດຕັ້ງດ້ວຍການສະຫນອງພະລັງງານທີ່ມີສະຖຽນລະພາບເພື່ອຮັບປະກັນການເຮັດວຽກປົກກະຕິຂອງເຄື່ອງມືເຄື່ອງຈັກ.
6.1.4.ເຄື່ອງມືຂອງເຄື່ອງຈັກຄວນຈະມີຫນ້າດິນທີ່ເຊື່ອຖືໄດ້: ສາຍດິນແມ່ນສາຍທອງແດງ, ເສັ້ນຜ່າສູນກາງຂອງສາຍບໍ່ຄວນຫນ້ອຍກວ່າ 10mm², ແລະຄວາມຕ້ານທານຂອງດິນຄວນຈະຫນ້ອຍກວ່າ 4 Ω.
6.1.5.ເພື່ອຮັບປະກັນການເຮັດວຽກປົກກະຕິຂອງອຸປະກອນ, ຖ້າອາກາດບີບອັດຂອງແຫຼ່ງອາກາດບໍ່ສາມາດຕອບສະຫນອງຄວາມຕ້ອງການຂອງແຫຼ່ງອາກາດ, ມັນຄວນຈະຖືກຕິດຕັ້ງໃສ່ເຄື່ອງມືຂອງເຄື່ອງຈັກ.
ຕື່ມຊຸດຂອງອຸປະກອນເຮັດຄວາມສະອາດແຫຼ່ງອາກາດ (dehumidification, degreasing, filtering) ກ່ອນອາກາດ.
6.1.6.ຮັກສາອຸປະກອນໃຫ້ຫ່າງຈາກແສງແດດໂດຍກົງ, ການສັ່ນສະເທືອນແລະຄວາມຮ້ອນ, ເຄື່ອງປັ່ນໄຟຄວາມຖີ່ສູງ, ເຄື່ອງເຊື່ອມໄຟຟ້າ, ແລະອື່ນໆ, ເພື່ອຫຼີກເວັ້ນການຜະລິດເຄື່ອງມືເຄື່ອງຈັກຫຼືການສູນເສຍຄວາມຖືກຕ້ອງຂອງເຄື່ອງມືເຄື່ອງຈັກ.
7.ທຕົວກໍານົດການທາງດ້ານເຕັກນິກ:
| ຕົວແບບ | 6025-6Z | |
| ຂະຫນາດ workpiece ການປຸງແຕ່ງ | ຍາວ × ກວ້າງ × ສູງ (ມມ) | 6000×2300×2300 |
| gantry feed ສູງສຸດ | ກວ້າງ (ມມ) | 6800 |
| ຂະຫນາດໂຕະເຮັດວຽກ | ຍາວ X ກວ້າງ (ມມ) | 3000*1000=4 |
| ການເດີນທາງຖັນ | ຖັນເລື່ອນໄປມາ (ມມ) | 7000 |
| ram double ຍົກຂຶ້ນແລະລົງ | ຈັງຫວະຂຶ້ນ ແລະ ລົງຂອງ ram (ມມ) | 2500 |
| Spindle ກາງຫາໄລຍະຫ່າງຍົນຕາຕະລາງ | 0-2500mm | |
|
ຫົວເຈາະປະເພດ ram ອອກຕາມລວງນອນ ຫົວພະລັງງານຫນຶ່ງສອງ
| ປະລິມານ (2) | 2 |
| Spindle taper | BT50 | |
| ເສັ້ນຜ່າສູນກາງເຈາະ (ມມ) | Φ2-Φ60 | |
| ເສັ້ນຜ່າສູນກາງການປາດ (ມມ) | M3-M30 | |
| ຄວາມໄວ spindle (r/min) | 30-5000 | |
| ພະລັງງານມໍເຕີ spindle Servo (kw) | 37*2 | |
| ໄລຍະການເດີນທາງຊ້າຍແລະຂວາລະຫວ່າງສອງປາຍ spindle | 5800-6800mm | |
| ຈັງຫວະຊ້າຍ ແລະຂວາຂອງ ram (ມມ) | 500 | |
| ຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງສອງທິດທາງ | 300mm*300mm | ±0.025 |
| ຄວາມຖືກຕ້ອງຂອງການຈັດຕຳແໜ່ງຊ້ຳສອງທິດທາງ | 300mm*300mm | ±0.02 |
| ຂະຫນາດເຄື່ອງມືເຄື່ອງຈັກ | ຍາວ × ກວ້າງ × ສູງ (ມມ) | ອີງຕາມຮູບແຕ້ມ (ຖ້າມີການປ່ຽນແປງໃນຂະບວນການອອກແບບ, ພວກເຮົາຈະແຈ້ງໃຫ້ທ່ານຮູ້) |
| ນ້ຳໜັກລວມ (ຕ) | 72 ທ | |