BOSM -4Z2000 CNC ຄວາມໄວສູງເຈາະແລະເຄື່ອງ milling
1.ການນໍາໃຊ້ອຸປະກອນ:
BOSM-1000 ເຄື່ອງເຈາະ CNC ຕາມແນວນອນແລະເຄື່ອງ milling ສ່ວນໃຫຍ່ແມ່ນໃຊ້ສໍາລັບການຂຸດເຈາະທີ່ມີປະສິດທິພາບຫຼາຍດ້ານ, milling, tapping ແລະເຈາະຂອງວາວ, ຕັນວາວ, ຫຼຸດຜ່ອນ, flanges, ແຜ່ນ, ແຫວນ, ສະຫນັບສະຫນູນ slewing ແລະ workpieces ອື່ນໆພາຍໃນລະດັບປະສິດທິພາບຂອງຄວາມຫນາ. . ການເຈາະ, milling, ປາດຢາງແລະການເຈາະສາມາດຮັບຮູ້ໄດ້ກ່ຽວກັບພາກສ່ວນວັດສະດຸດຽວແລະວັດສະດຸປະສົມ. ຂະບວນການເຄື່ອງຈັກຂອງເຄື່ອງຈັກໄດ້ຖືກຄວບຄຸມແບບດິຈິຕອນ, ແລະການດໍາເນີນງານແມ່ນສະດວກຫຼາຍ. ມັນສາມາດຮັບຮູ້ອັດຕະໂນມັດ, ຄວາມແມ່ນຍໍາສູງ, ຫຼາຍແນວພັນແລະການຜະລິດຈໍານວນຫລາຍ.
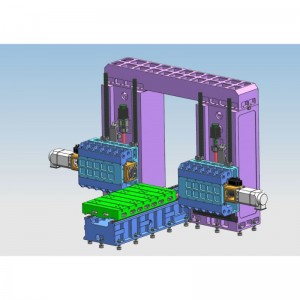
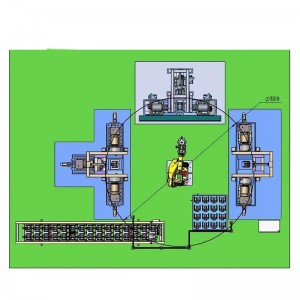
2. ໂຄງສ້າງອຸປະກອນ:
ອຸປະກອນນີ້ແມ່ນປະກອບດ້ວຍຕຽງນອນ, CNC indexing ຕາຕະລາງ rotary, ຖັນເຄື່ອນທີ່, saddle ເຄື່ອນທີ່, ການເຈາະແລະຫົວພະລັງງານ milling, ອຸປະກອນ lubrication ອັດຕະໂນມັດແລະອຸປະກອນປ້ອງກັນ, ອຸປະກອນເຮັດຄວາມເຢັນ circulating, ລະບົບການຄວບຄຸມດິຈິຕອນ, ລະບົບໄຮໂດຼລິກ, ລະບົບໄຟຟ້າແລະອື່ນໆ. ລົດໄຟຄູ່ມືເສັ້ນມ້ວນແມ່ນສະຫນັບສະຫນູນແລະນໍາພາ, ແລະຄວາມແມ່ນຍໍາ screw ແມ່ນຂັບເຄື່ອນ. ເຄື່ອງຈັກມີຄວາມຖືກຕ້ອງຂອງຕໍາແຫນ່ງສູງແລະຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງຊ້ໍາອີກ.
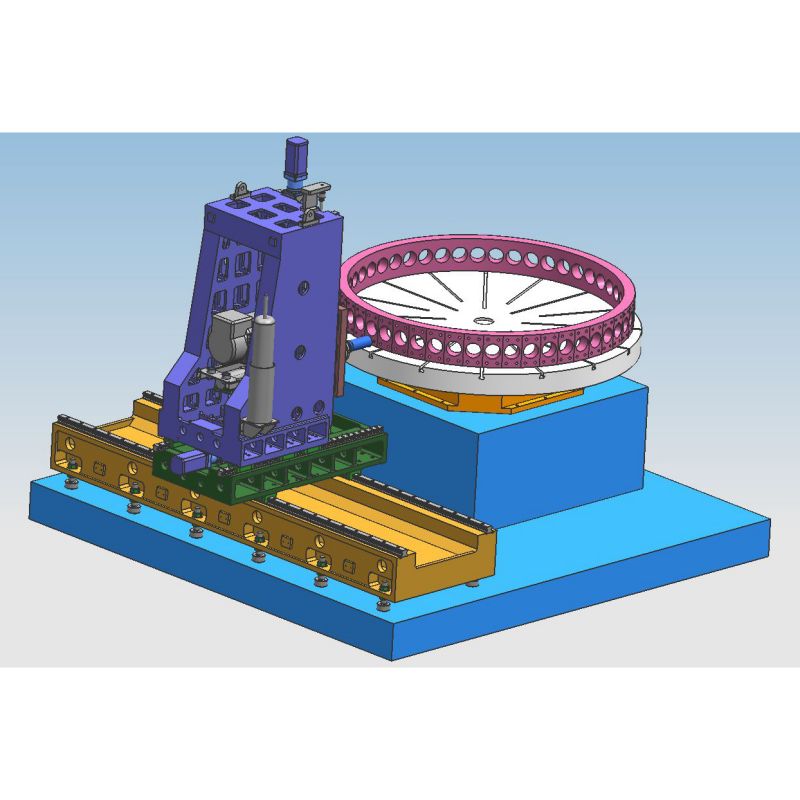
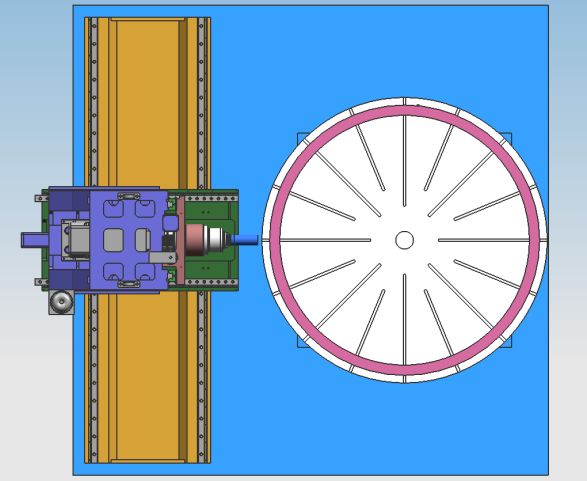
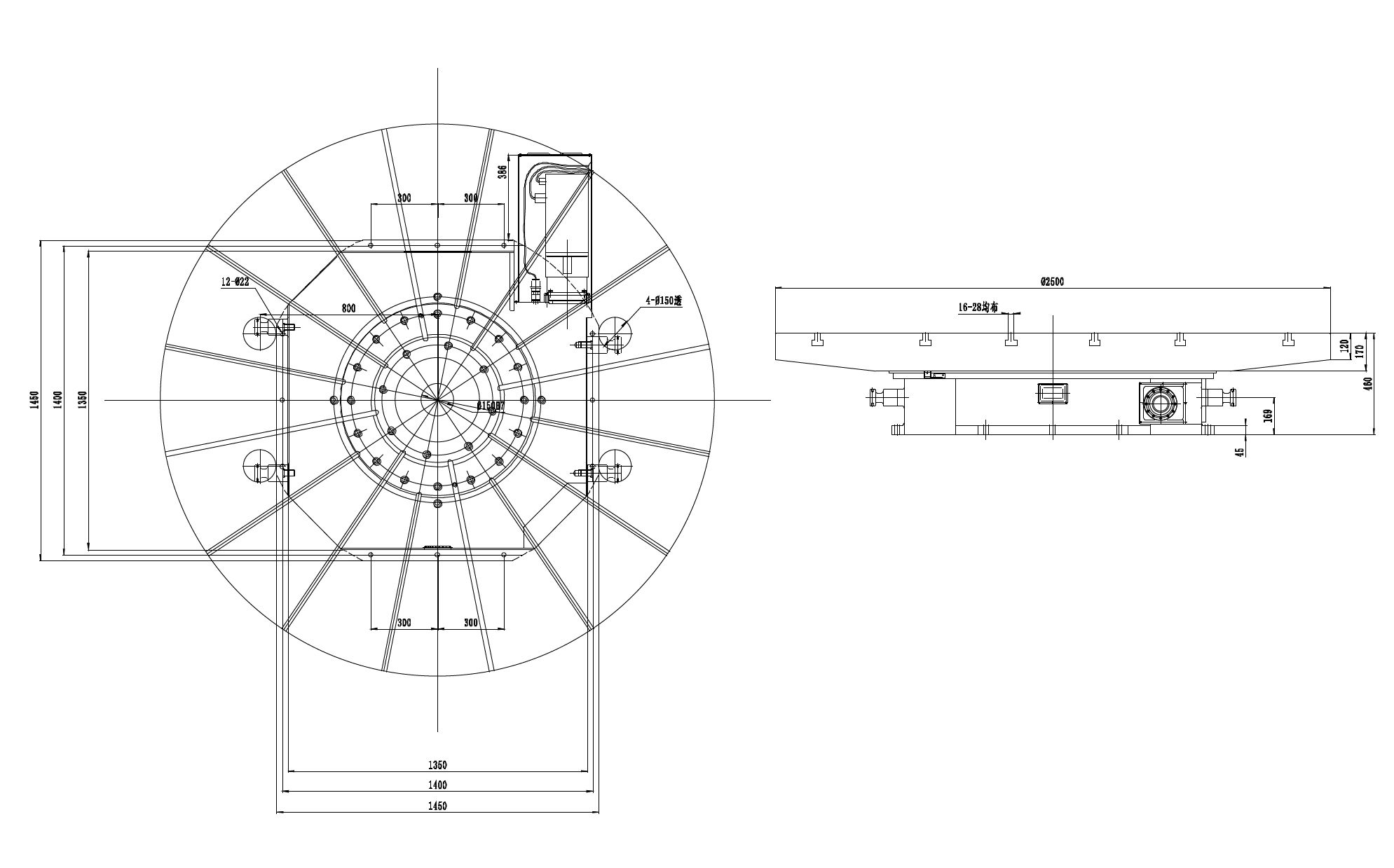
2.1. ໂຕະເຮັດວຽກຕຽງ: ຕຽງນອນແມ່ນເຮັດດ້ວຍສ່ວນໂຄງສ້າງຂອງທາດເຫຼັກ HT250. ມັນແມ່ນສໍາເລັດຫຼັງຈາກ tempering ທີສອງເພື່ອເອົາຄວາມກົດດັນພາຍໃນ. ມັນມີຄວາມແຂງກະດ້າງແບບເຄື່ອນໄຫວແລະສະຖິດທີ່ດີແລະບໍ່ມີການປ່ຽນຮູບ. ແຜ່ນດັດສະນີການຄວບຄຸມຕົວເລກທີ່ມີຄວາມແມ່ນຍໍາ, servo drive 360° ການຈັດຕໍາແຫນ່ງດັດສະນີທີ່ມັກແລະການລັອກອາກາດ / ໄຮໂດຼລິກ, ລະບົບຂັບໃຊ້ AC servo motor ເພື່ອດັດສະນີສ່ວນ shaft rotating ອັດຕະໂນມັດ 360°, ແລະຄວາມຖືກຕ້ອງຂອງດັດສະນີແມ່ນຫນຶ່ງພັນຂອງອົງສາ. ແຜ່ນດັດສະນີແມ່ນວາງຢູ່ເທິງສຸດຂອງຕຽງນອນ, ແລະ bolts ທີ່ສາມາດປັບໄດ້ແມ່ນແຈກຢາຍຢູ່ດ້ານລຸ່ມຂອງຕຽງ, ເຊິ່ງສາມາດປັບລະດັບຂອງຕາຕະລາງເຮັດວຽກຂອງຕຽງໄດ້ຢ່າງງ່າຍດາຍ.
2.2. ຖັນທີ່ສາມາດເຄື່ອນຍ້າຍໄດ້: ຖັນໂຄງສ້າງເຫລໍກທີ່ສາມາດເຄື່ອນໄດ້ແມ່ນສໍາເລັດຫຼັງຈາກການປິ່ນປົວຄວາມຮ້ອນຂັ້ນສອງເພື່ອເອົາຄວາມກົດດັນພາຍໃນ. ມັນມີຄວາມແຂງກະດ້າງແບບເຄື່ອນໄຫວແລະສະຖິດທີ່ດີແລະບໍ່ມີການປ່ຽນຮູບ. ຊຸດຂອງຄູ່ສະກູບານທີ່ມີຄວາມແມ່ນຍໍາແລະມໍເຕີ servo ເຮັດໃຫ້ຄໍລໍາເລື່ອນໄປໃນທິດທາງແກນ Y. ຊຸດຂອງຄູ່ສະກູບານທີ່ມີຄວາມແມ່ນຍໍາແລະມໍເຕີ servo ເຮັດໃຫ້ຄໍລໍາເລື່ອນໄປໃນທິດທາງ X-axis. ຕິດຕັ້ງຫົວເຈາະໃສ່ເຄື່ອງເລື່ອນຂອງຫນ່ວຍງານ. ການເຄື່ອນໄຫວຂອງຖັນແມ່ນຮັບຮູ້ໂດຍການຫມຸນຂອງຫມາກແຫ້ງເປືອກແຂງໃນ screw ບານໄດ້ຂັບເຄື່ອນໂດຍ servo motor ໂດຍຜ່ານການ coupling ໄດ້.
2.3. saddle ມືຖື: saddle ມືຖືໄດ້ຖືກຕິດຕັ້ງດ້ວຍສອງຄູ່ທາງລົດໄຟຄູ່ມືເສັ້ນທີ່ມີຄວາມສາມາດສູງພິເສດມ້ວນ, ຊຸດຂອງຄູ່ສະກູບານທີ່ມີຄວາມແມ່ນຍໍາແລະມໍເຕີ servo, ເຊິ່ງເຮັດໃຫ້ຫົວພະລັງງານເຈາະຍ້າຍໃນທິດທາງ Z-axis, ເຊິ່ງສາມາດ ຮັບຮູ້ພະລັງງານຫົວຫນ້າໄວໄປຫນ້າ, ເຮັດວຽກໄປຫນ້າ, reverse ໄວ, ຢຸດແລະການປະຕິບັດອື່ນໆ. ມັນມີຫນ້າທີ່ຂອງ chip breaking ອັດຕະໂນມັດ, ການໂຍກຍ້າຍຊິບແລະພັກໄວ້.
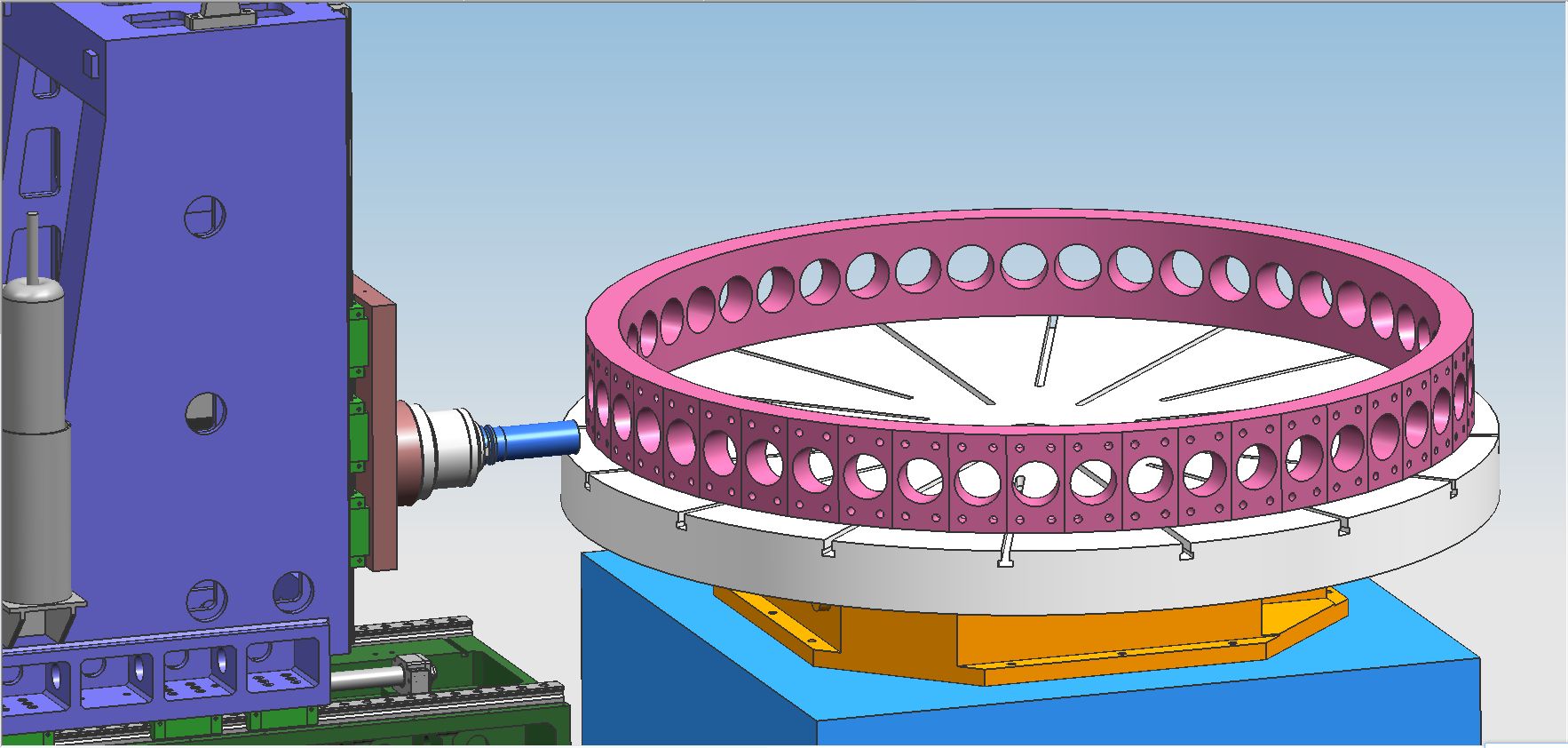
2.4. ຫົວພະລັງງານເຈາະ: ຫົວພະລັງງານເຈາະໄດ້ຮັບຮອງເອົາ spindle ກົນຈັກໄຕ້ຫວັນ, ແລະ spindle ຄວາມແມ່ນຍໍາພິເສດ adopts ຮັບຜິດຊອບເປັນລ່ຽມ, ເຊິ່ງຮັບຮູ້ການປ່ຽນແປງຄວາມໄວ stepless ໂດຍຜ່ານສາຍສົ່ງສາຍແອວ synchronous ທີ່ມີຄວາມເຂັ້ມແຂງສູງ. ຂັບເຄື່ອນໂດຍ servo motors ແລະ screws ບານ. ແກນ Y ສາມາດເຊື່ອມຕໍ່, ຮັບຮອງເອົາການຄວບຄຸມເຄິ່ງປິດວົງ, ແລະສາມາດຮັບຮູ້ຫນ້າທີ່ interpolation linear ແລະວົງ. ປາຍ spindle ແມ່ນຮູ BT50 taper.
2.5. ອຸປະກອນການຫລໍ່ລື່ນອັດຕະໂນມັດ ແລະອຸປະກອນປ້ອງກັນ:
ເຄື່ອງຈັກນີ້ແມ່ນມີອຸປະກອນການຫລໍ່ລື່ນອັດຕະໂນມັດ, ເຊິ່ງສາມາດ lubricate ຄູ່ເຄື່ອນທີ່ອັດຕະໂນມັດເຊັ່ນ: ລໍ້ຄູ່ມື, screws ນໍາ, ແລະ racks. ເຄື່ອງ
ແກນ Z ແລະແກນ Y ແມ່ນຕິດຕັ້ງຝາປິດປ້ອງກັນຂີ້ຝຸ່ນ, ແລະແຜ່ນຕິດຂັດກັນນ້ໍາໄດ້ຖືກຕິດຕັ້ງຮອບໂຕະເຮັດວຽກ.
2.6. ລະບົບຄວບຄຸມຕົວເລກດິຈິຕອນເຕັມຮູບແບບ:
2.6.1. ດ້ວຍການທໍາງານຂອງ chip breaking, ເວລາ breaking chip ແລະ chip breaking cycle ສາມາດຖືກກໍານົດຢູ່ໃນການໂຕ້ຕອບ man-machine.
2.6.2. ພ້ອມກັບຟັງຊັນຍົກເຄື່ອງມື, ລະດັບຄວາມສູງຍົກເຄື່ອງມືສາມາດຕັ້ງຢູ່ໃນການໂຕ້ຕອບຂອງເຄື່ອງຈັກ. ເມື່ອເຈາະເຖິງລະດັບຄວາມສູງນີ້, ແຜ່ນເຈາະໄດ້ຖືກຍົກຂຶ້ນຢ່າງໄວວາໄປຫາດ້ານເທິງຂອງ workpiece, ຫຼັງຈາກນັ້ນ chip ໄດ້ຖືກຖິ້ມອອກ, ແລະຫຼັງຈາກນັ້ນຢ່າງວ່ອງໄວສົ່ງຕໍ່ກັບຫນ້າດິນເຈາະແລະປ່ຽນອັດຕະໂນມັດເຮັດວຽກ.
2.6.3. ກ່ອງຄວບຄຸມການປະຕິບັດການສູນກາງແລະຫນ່ວຍງານທີ່ຖືດ້ວຍມືຮັບຮອງເອົາລະບົບການຄວບຄຸມຕົວເລກແລະຖືກຕິດຕັ້ງດ້ວຍການໂຕ້ຕອບ USB ແລະຫນ້າຈໍສະແດງຜົນຜລຶກ LCD. ເພື່ອອໍານວຍຄວາມສະດວກໃນການຂຽນໂປລແກລມ, ການເກັບຮັກສາ, ການສະແດງຜົນແລະການສື່ສານ, ການໂຕ້ຕອບການດໍາເນີນງານມີຫນ້າທີ່ເຊັ່ນ: ການສົນທະນາກັບເຄື່ອງຈັກ, ການຊົດເຊີຍຄວາມຜິດພາດ, ແລະການແຈ້ງເຕືອນອັດຕະໂນມັດ.
2.6.4. ອຸປະກອນມີຫນ້າທີ່ສະແດງຕົວຢ່າງແລະກວດກາຄືນຕໍາແຫນ່ງຂຸມກ່ອນທີ່ຈະປຸງແຕ່ງ, ແລະການດໍາເນີນງານແມ່ນສະດວກຫຼາຍ.
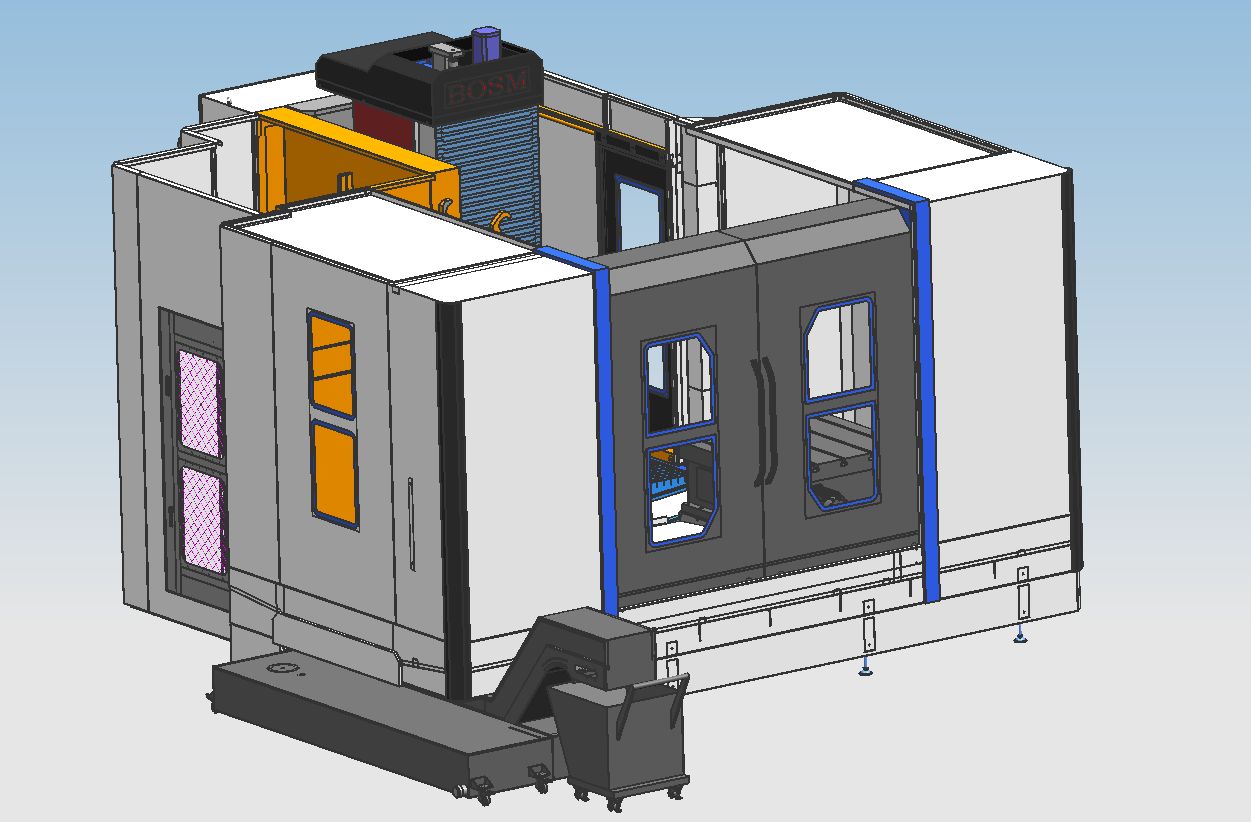
* ເພື່ອຮັບປະກັນຄວາມສະດວກສະບາຍຂອງ hoisting ແລະການໃຫ້ອາຫານແຫວນຂະຫນາດໃຫຍ່, ເຄື່ອງບໍ່ມີການປົກປ້ອງພາຍນອກ, ແລະການປ້ອງກັນພາຍນອກແມ່ນທາງເລືອກ.
3. ເຄື່ອງສະພາບແວດລ້ອມການນໍາໃຊ້:
ການສະຫນອງພະລັງງານ: ສາມເຟດ AC380V ± 10%, 50Hz ± 1 ອຸນຫະພູມສະພາບແວດລ້ອມ: 0 ° ~ 45 °
4.ຕົວກໍານົດການດ້ານວິຊາການ
| ຕົວແບບ | BOSM-1000 | |
| ການປະມວນຜົນສູງສຸດ ຂະຫນາດ workpiece | ເສັ້ນຜ່າສູນກາງການຫມຸນສູງສຸດທີ່ອະນຸຍາດຂອງ workpiece ໄດ້ (ມມ) | ≤Φ2000 |
|
ໂຕະເຮັດວຽກ | ຂະຫນາດຂອງຕາຕະລາງເຮັດວຽກ (ມມ) ຮຽບຮ້ອຍ | □1000 |
| ຂະໜາດຂອງໂຕະເຮັດວຽກ (ມມ) ຮອບ | Φ1200 | |
| ການໂຫຼດສູງສຸດຕາມລວງນອນ (ກິໂລ) | 5000 | |
|
ໜ່ວຍເຈາະ Ram ແນວຕັ້ງ | ຈຳນວນ | 1 |
| Spindle taper | BT50 | |
| ເສັ້ນຜ່າສູນກາງເຈາະ (ມມ) | 2-120 | |
| ເສັ້ນຜ່າສູນກາງແຜ່ນຕັດ (ມມ) | 200 | |
| ເສັ້ນຜ່າສູນກາງການປາດ (ມມ) | M6-M36 | |
| ໄລຍະຫ່າງຈາກປາຍ spindle ໄປຫາສູນກາງຕາຕະລາງ (ມມ) | 1000-1600 | |
| ໄລຍະຫ່າງຈາກສູນກາງ spindle ກັບຍົນເທິງຂອງຕາຕະລາງ (ມມ) | 100-1100 | |
| ຄວາມໄວ spindle (r/min) | 30-3000 | |
| ພະລັງງານມໍເຕີ spindle (kw) | 30 | |
| ຊິ້ນວຽກ ແກນໝູນວຽນ (ແກນ A) | ຈໍານວນການແບ່ງສູງສຸດ (ມມ) | 360° |
| ກໍານົດຫົວຫນ່ວຍການແບ່ງຂັ້ນຕ່ໍາ | 0.001° | |
| ພະລັງງານ servo motor A-axis (kw) | 4.2 | |
| ຫົວພະລັງງານເລື່ອນຊ້າຍແລະຂວາ (ແກນ X) | ຈັງຫວະສູງສຸດ (ມມ) | 2000 |
| ຄວາມໄວໃນການເຄື່ອນຍ້າຍແກນ X (m/min) | 0~8 | |
| ແກນ X-axis servo motor power (kw) | 2.4 | |
| ຫົວພະລັງງານເຄື່ອນຂຶ້ນລົງ (ແກນ Y) | ຈັງຫວະສູງສຸດ (ມມ) | 1000 |
| ຄວາມໄວເຄື່ອນທີ່ຂອງແກນ Y (m/min) | 0~8 | |
| ພະລັງງານ servo motor ແກນ Y (kw) | 2.4 ເບກ | |
| ການເຄື່ອນທີ່ຕາມລວງຍາວຂອງຖັນ (ແກນ Z) | ຈັງຫວະສູງສຸດ (ມມ) | 600 |
| ຄວາມໄວການເຄື່ອນຍ້າຍຂອງແກນ Z (m/min) | 0~4 | |
| ແກນ Z servo motor power (kw) | 2.4 | |
| ຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງ | 1000 ມມ | ±0.05 |
| ການເຮັດຊ້ຳ | 1000 ມມ | ±0.025 |
| ຕາຕະລາງດັດສະນີ CNC ຄວາມຖືກຕ້ອງຂອງດັດສະນີ (ມມ) |
| 15” |
| ຂະໜາດເຄື່ອງ (ລວມທັງການປົກປ້ອງ) | ຄວາມຍາວ (X) × ກວ້າງ (Z) × ຄວາມສູງ (Y) (ມມ) | 5300*6000*3400 |
| ນ້ຳໜັກລວມ (t)ລວມທັງການປ້ອງກັນ | (ກ່ຽວກັບ) 20 | |