






BOSM -Horizontal Counter Drilling ແລະເຈາະເຄື່ອງ
1. ການນຳໃຊ້ອຸປະກອນ:
BOSM ເຄື່ອງເຈາະແລະເຈາະຕາມແນວນອນແມ່ນເຄື່ອງພິເສດສໍາລັບບໍລິສັດຂອງທ່ານເພື່ອປຸງແຕ່ງ tower crane caps. ເຄື່ອງຈັກໄດ້ຖືກຕິດຕັ້ງດ້ວຍ 2 ຊຸດເຈາະຕາມແນວນອນແລະຫົວພະລັງງານທີ່ຫນ້າເບື່ອ, ເຊິ່ງສາມາດຮັບຮູ້ການເຈາະ, milling ແລະເຈາະຂອງ workpieces ພາຍໃນຂອບເຂດເສັ້ນເລືອດຕັນໃນທີ່ມີປະສິດທິພາບ. ການຕັດແລະການປຸງແຕ່ງອື່ນໆ, ຄວາມໄວການຈັດຕໍາແຫນ່ງອຸປະກອນແມ່ນໄວ, ຄວາມຖືກຕ້ອງຂອງການປຸງແຕ່ງແມ່ນສູງ, ແລະປະສິດທິພາບການປຸງແຕ່ງແມ່ນສູງ.
2. ລັກສະນະໂຄງສ້າງຂອງອຸປະກອນ:
2. 1. ອົງປະກອບຕົ້ນຕໍຂອງການເຄື່ອງ
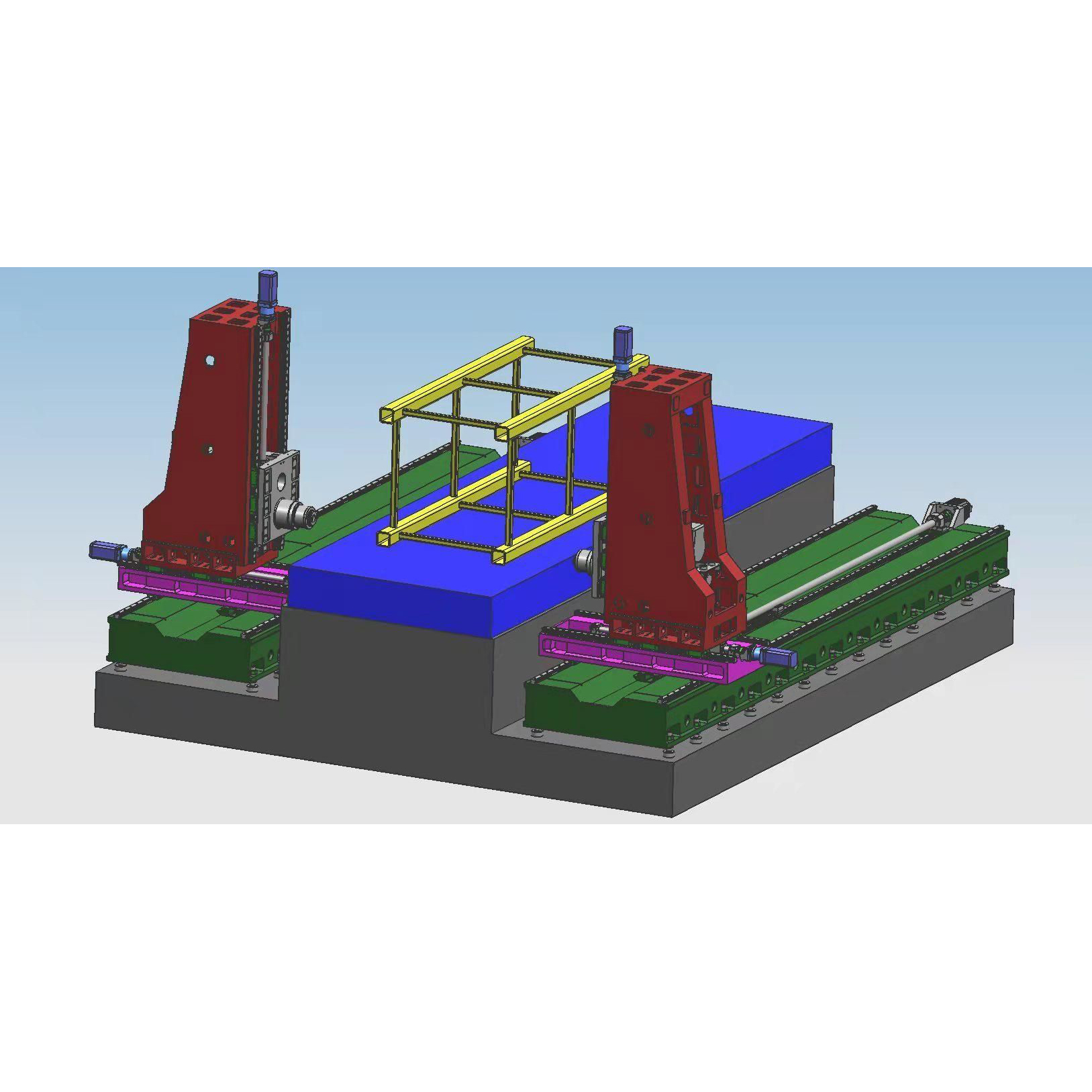
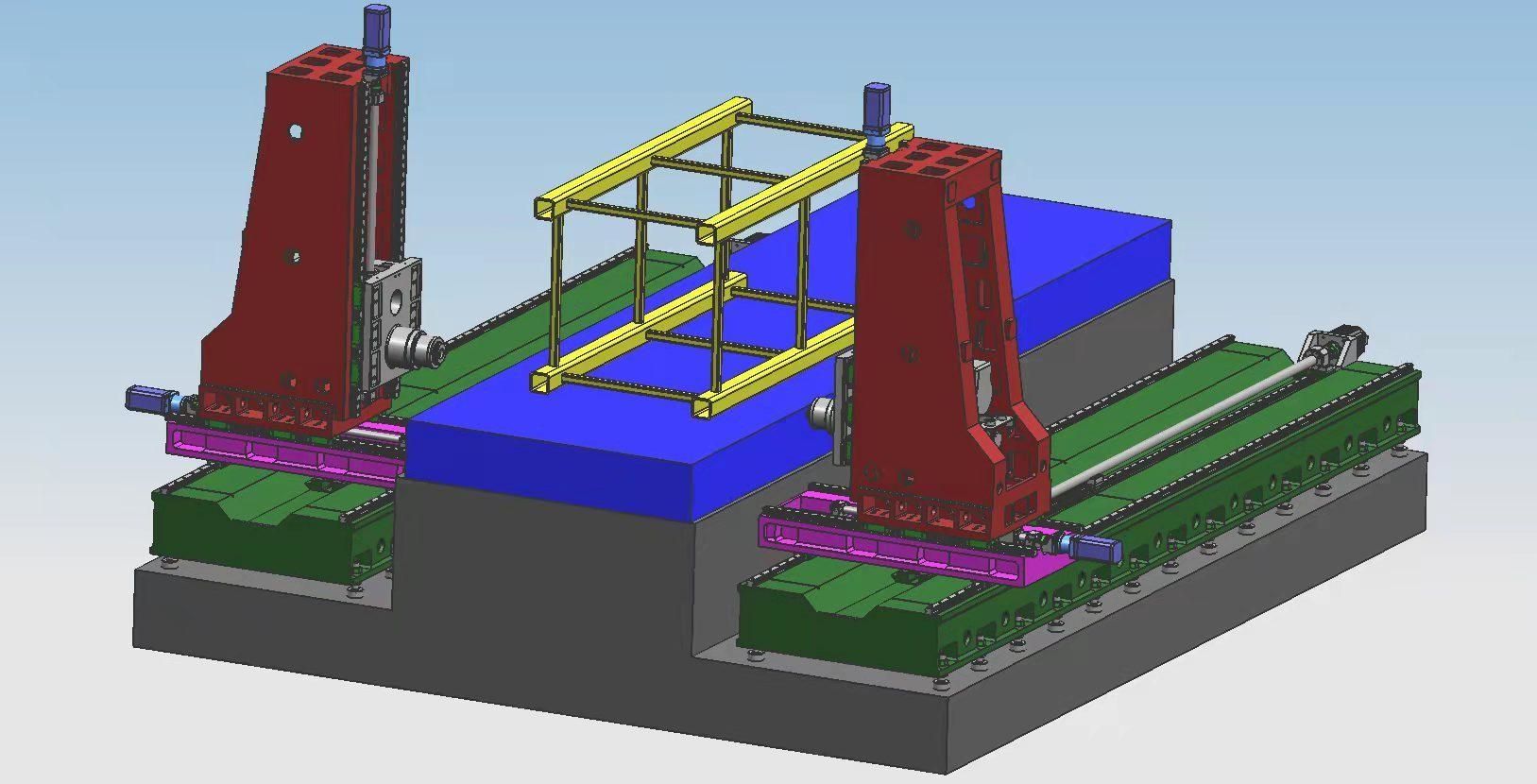
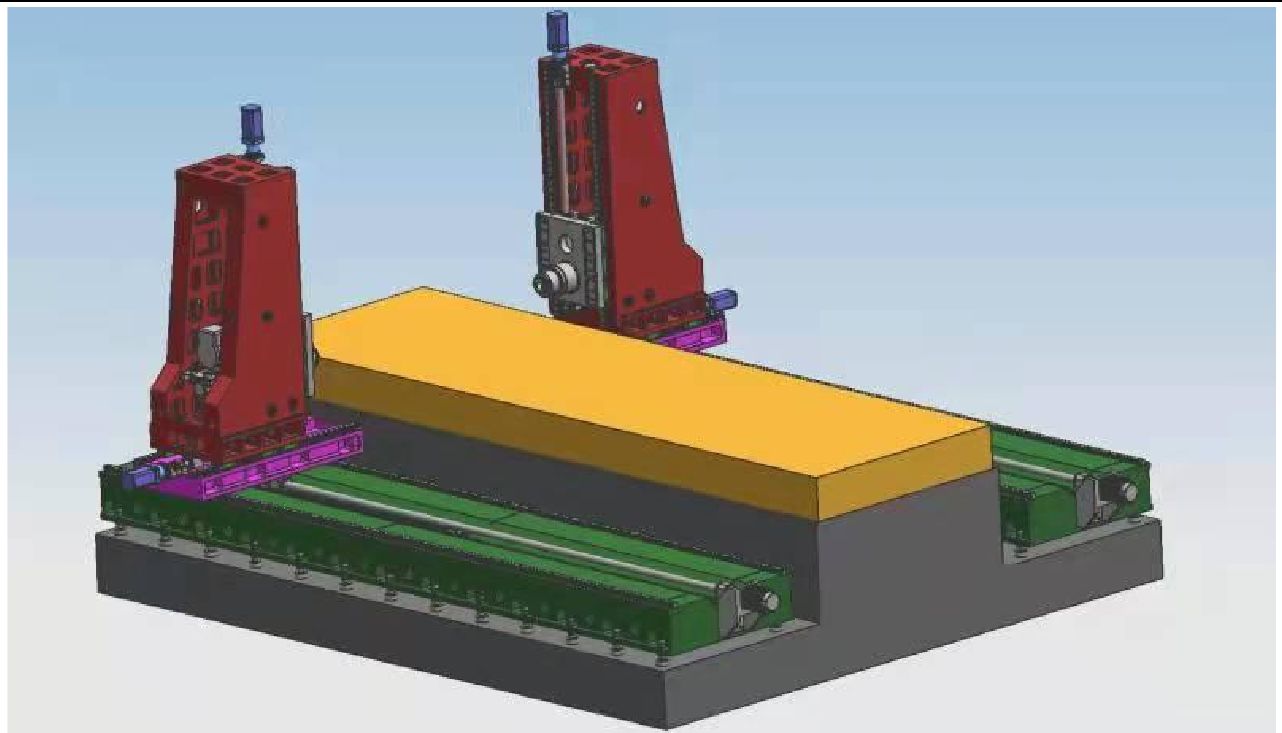
ອົງປະກອບຕົ້ນຕໍຂອງເຄື່ອງ: ຕຽງ, ໂຕະເຮັດວຽກ, ຖັນຊ້າຍແລະຂວາ, saddles, rams, ແລະອື່ນໆ, ພາກສ່ວນຂະຫນາດໃຫຍ່ແມ່ນເຮັດດ້ວຍດິນຊາຍ molding, ທາດເຫຼັກສີຂີ້ເຖົ່າສູງ 250 casting, annealed ໃນຂຸມດິນຊາຍຮ້ອນ → vibration aging →ຮ້ອນ. furnace annealing → vibration aging → roughing machining → vibration aging → furnace annealing → vibration aging →ສໍາເລັດຮູບເພື່ອລົບລ້າງຄວາມກົດດັນທາງລົບຂອງພາກສ່ວນທັງຫມົດແລະເຮັດໃຫ້ປະສິດທິພາບຂອງພາກສ່ວນຫມັ້ນຄົງ. ໂຕະເຮັດວຽກຂອງອຸປະກອນໄດ້ຖືກສ້ອມແຊມ, ແລະຫົວພະລັງງານທັງສອງດ້ານສາມາດເຄື່ອນຍ້າຍໄປໃນທິດທາງດ້ານຫນ້າແລະຫລັງຂອງຖານ; ເຄື່ອງຈັກມີຫນ້າທີ່ເຊັ່ນ: ການເຈາະ, ເຈາະ, countersinking, ປາດຢາງ, ແລະອື່ນໆ. ວິທີການເຮັດຄວາມເຢັນຂອງເຄື່ອງມືແມ່ນການເຮັດໃຫ້ເຢັນພາຍໃນບວກກັບຄວາມເຢັນພາຍນອກ. ເຄື່ອງຈັກມີ 5 ແກນອາຫານ, 2 ຫົວຕັດໄຟຟ້າ, ເຊິ່ງສາມາດ synchronized ກັບ 5 ແກນໃນເວລາດຽວກັນ, ຫຼືສາມາດປະຕິບັດດຽວ. ທິດທາງແກນຂອງເຄື່ອງຈັກແລະຫົວພະລັງງານແມ່ນສະແດງຢູ່ໃນຮູບຂ້າງລຸ່ມນີ້.
2. 2 ໂຄງສ້າງຕົ້ນຕໍຂອງພາກສ່ວນອາຫານການສົ່ງຜ່ານ axial
2.2.1 ແກນ X: ຫົວພະລັງງານ reciprocates ຂ້າງຄຽງຕາມເສັ້ນທາງນໍາພາຂອງຖານ.
ຂັບ X1-axis: AC servo motor ບວກກັບ planetary reducer ຄວາມແມ່ນຍໍາສູງຖືກນໍາໃຊ້ເພື່ອຂັບຫົວພະລັງງານຜ່ານບານ screw drive ເພື່ອຮັບຮູ້ການເຄື່ອນໄຫວ linear ຂອງ X-axis.
ລະບົບສາຍສົ່ງ X2-axis: AC servo motor ບວກກັບ planetary reducer ຄວາມແມ່ນຍໍາສູງຖືກນໍາໃຊ້ເພື່ອຂັບລົດຫົວພະລັງງານໂດຍຜ່ານການສົ່ງ screw ບານເພື່ອຮັບຮູ້ການເຄື່ອນໄຫວເສັ້ນ X-axis.
ຮູບແບບລົດໄຟຄູ່ມື: ລາງລົດໄຟຄູ່ມືເສັ້ນທີ່ມີຄວາມແມ່ນຍໍາມີຄວາມເຂັ້ມແຂງສູງສອງແມ່ນຖືກກະເບື້ອງຢູ່ເທິງຖານທີ່ກວ້າງຂວາງ.
2.2 ແກນ Y1: ຫົວພະລັງງານ reciprocate ຂຶ້ນແລະລົງເທິງຖັນ.
ຂັບແກນ Y1: ໃຊ້ມໍເຕີ AC servo ເພື່ອຂັບຜ່ານສະກູບານເພື່ອຮັບຮູ້ການເຄື່ອນໄຫວເສັ້ນຊື່ຂອງແກນ Y1. ຮູບແບບທາງລົດໄຟຄູ່ມື: 4 ຊິ້ນຂອງ 45 ປະເພດລົດໄຟຄູ່ມືເສັ້ນ.
2.2.3 ແກນ Y2: ຫົວພະລັງງານ reciprocates ຂຶ້ນແລະລົງເທິງຖັນ.
ການສົ່ງສັນຍານ Y2-axis: AC servo motor ຖືກນໍາໃຊ້ເພື່ອຂັບຜ່ານ screw ບານເພື່ອຮັບຮູ້ການເຄື່ອນໄຫວ linear ຂອງ Y1-axis.
ຮູບແບບທາງລົດໄຟຄູ່ມື: 4 ຊິ້ນຂອງ 45 ປະເພດລົດໄຟຄູ່ມືເສັ້ນ.
2.2.4 ແກນ Z1: ຫົວພະລັງງານ reciprocate ກັບໄປແລະດັງນີ້ຕໍ່ໄປກ່ຽວກັບ saddle ໄດ້.
ການສົ່ງຜ່ານແກນ Z1: ມໍເຕີ AC servo ແລະເຄື່ອງຫຼຸດຜ່ອນດາວເຄາະທີ່ມີຄວາມແມ່ນຍໍາສູງຖືກນໍາໃຊ້ເພື່ອຂັບເຄື່ອນການເຄື່ອນໄຫວຜ່ານສະກູບານເພື່ອຮັບຮູ້ການເຄື່ອນໄຫວເສັ້ນຊື່ຂອງແກນ Z1.
2.2.5 Z2 axis: ຫົວພະລັງງານ reciprocate ກັບແລະດັງນີ້ຕໍ່ໄປກ່ຽວກັບ saddle ໄດ້.
ການສົ່ງຜ່ານແກນ Z2: ມໍເຕີ AC servo ແລະເຄື່ອງຫຼຸດຜ່ອນດາວເຄາະທີ່ມີຄວາມແມ່ນຍໍາສູງຖືກນໍາໃຊ້ເພື່ອຂັບລົດການເຄື່ອນໄຫວຜ່ານບານສະກູເພື່ອຮັບຮູ້ການເຄື່ອນໄຫວເສັ້ນ Z2-axis.
2.3. ການຖອດຊິບແລະການເຮັດຄວາມເຢັນ
ມີທໍ່ລໍາລຽງຊິບຮາບພຽງຢູ່ສອງດ້ານພາຍໃຕ້ບ່ອນເຮັດວຽກ, ແລະແຜ່ນເຫຼັກສາມາດຖືກປ່ອຍເຂົ້າໄປໃນທໍ່ລໍາລຽງຊິບໃນຕອນທ້າຍເພື່ອຮັບຮູ້ການຜະລິດທີ່ມີອາລະຍະທໍາ. ມີປັ໊ມເຮັດຄວາມເຢັນຢູ່ໃນຖັງ coolant ຂອງລໍາລຽງຊິບ, ເຊິ່ງສາມາດນໍາໃຊ້ສໍາລັບການເຮັດຄວາມເຢັນພາຍໃນ + ຄວາມເຢັນພາຍນອກຂອງເຄື່ອງມືເພື່ອຮັບປະກັນປະສິດທິພາບແລະຊີວິດການບໍລິການຂອງເຄື່ອງມື, ແລະ coolant ສາມາດນໍາມາໃຊ້ໃຫມ່.
3. ລະບົບຄວບຄຸມຕົວເລກດິຈິຕອນເຕັມຮູບແບບ:
3.1. ດ້ວຍການທໍາງານຂອງ chip breaking, ເວລາ breaking chip ແລະ chip breaking cycle ສາມາດຖືກກໍານົດຢູ່ໃນການໂຕ້ຕອບ man-machine.
3.2. ດ້ວຍຟັງຊັນຍົກເຄື່ອງມື, ໄລຍະການຍົກເຄື່ອງມືສາມາດຕັ້ງຢູ່ໃນການໂຕ້ຕອບຂອງເຄື່ອງຈັກ. ເມື່ອເຖິງໄລຍະຫ່າງ, ເຄື່ອງມືຈະຖືກຍົກຂຶ້ນຢ່າງໄວວາ, ແລະຫຼັງຈາກນັ້ນຊິບຈະຖືກຖິ້ມ, ແລະຫຼັງຈາກນັ້ນໄວຕໍ່ຫນ້າດິນເຈາະແລະປ່ຽນອັດຕະໂນມັດເພື່ອເຮັດວຽກ.
3.2. ກ່ອງຄວບຄຸມການປະຕິບັດການສູນກາງແລະຫນ່ວຍງານ handheld ຮັບຮອງເອົາລະບົບການຄວບຄຸມຕົວເລກແລະອຸປະກອນທີ່ມີການໂຕ້ຕອບ USB ແລະຈໍສະແດງຜົນຜລຶກຂອງແຫຼວ LCD. ເພື່ອອໍານວຍຄວາມສະດວກໃນການຂຽນໂປລແກລມ, ການເກັບຮັກສາ, ການສະແດງຜົນແລະການສື່ສານ, ການໂຕ້ຕອບການດໍາເນີນງານມີຫນ້າທີ່ເຊັ່ນ: ການສົນທະນາກັບເຄື່ອງຈັກ, ການຊົດເຊີຍຄວາມຜິດພາດ, ແລະການແຈ້ງເຕືອນອັດຕະໂນມັດ.
3.2.. ອຸປະກອນມີຫນ້າທີ່ສະແດງຕົວຢ່າງແລະກວດກາຄືນຕໍາແຫນ່ງຂຸມກ່ອນທີ່ຈະປຸງແຕ່ງ, ແລະການດໍາເນີນງານແມ່ນສະດວກຫຼາຍ.
4. ການຫລໍ່ລື່ນອັດຕະໂນມັດ
ຄູ່ທາງລົດໄຟຄູ່ມືເສັ້ນທີ່ມີຄວາມແມ່ນຍໍາຂອງເຄື່ອງຈັກ, ຄູ່ສະກູບານທີ່ມີຄວາມແມ່ນຍໍາແລະຄູ່ການເຄື່ອນໄຫວທີ່ມີຄວາມແມ່ນຍໍາສູງອື່ນໆແມ່ນມີລະບົບການຫລໍ່ລື່ນອັດຕະໂນມັດ. ປັ໊ມນໍ້າມັນຫລໍ່ລື່ນອັດຕະໂນມັດຈະສົ່ງນໍ້າມັນແຮງດັນ, ແລະຫ້ອງນໍ້າມັນເຄື່ອງຫຼໍ່ລື່ນຕາມປະລິມານຈະເຂົ້າສູ່ນໍ້າມັນ. ເມື່ອຫ້ອງນ້ໍາມັນເຕັມໄປດ້ວຍນ້ໍາມັນແລະຄວາມກົດດັນຂອງລະບົບເພີ່ມຂຶ້ນເຖິງ 1.4 ~ 1.75Mpa, ສະຫຼັບຄວາມກົດດັນໃນລະບົບຖືກປິດ, ປັ໊ມຢຸດ, ແລະປ່ຽງ unloading ແມ່ນ unloaded ໃນເວລາດຽວກັນ. ເມື່ອຄວາມກົດດັນຂອງນ້ໍາມັນຢູ່ໃນເສັ້ນທາງຫຼຸດລົງຕໍ່າກວ່າ 0.2Mpa, ເຄື່ອງຫລໍ່ລື່ນປະລິມານເລີ່ມຕື່ມໃສ່ຈຸດທີ່ຫລໍ່ລື່ນແລະສໍາເລັດການຕື່ມນ້ໍາມັນຫນຶ່ງ. ເນື່ອງຈາກປະລິມານທີ່ຊັດເຈນຂອງນ້ໍາມັນທີ່ສະຫນອງໂດຍ oiler ປະລິມານແລະຄວາມສາມາດໃນການກວດສອບຄວາມດັນຂອງລະບົບ, ການສະຫນອງນ້ໍາມັນແມ່ນຫນ້າເຊື່ອຖືແລະຮັບປະກັນວ່າມີຮູບເງົານ້ໍາມັນຢູ່ໃນຫນ້າຂອງແຕ່ລະຄູ່ kinematic, ເຊິ່ງຊ່ວຍຫຼຸດຜ່ອນຄວາມແຕກຫັກແລະການສວມໃສ່ແລະປ້ອງກັນຄວາມເສຍຫາຍ. ກັບໂຄງສ້າງພາຍໃນທີ່ເກີດຈາກ overheating. , ເພື່ອຮັບປະກັນຄວາມຖືກຕ້ອງແລະຊີວິດຂອງເຄື່ອງຈັກ.
5. ເຄື່ອງສະພາບແວດລ້ອມການນໍາໃຊ້:
ການສະຫນອງພະລັງງານ: AC380V ± 10%, 50Hz ± 1 ອຸນຫະພູມສະພາບແວດລ້ອມ: -10 ° ~ 45 °
6. ເງື່ອນໄຂການຍອມຮັບ:
JB/T10051-1999 "ຂໍ້ກໍາຫນົດດ້ານວິຊາການທົ່ວໄປສໍາລັບລະບົບໄຮໂດຼລິກຂອງເຄື່ອງຕັດໂລຫະ"
7. ຕົວກໍານົດການດ້ານວິຊາການ:
| ຕົວແບບ | 2050-5Z | |
| ຂະຫນາດ workpiece ການປຸງແຕ່ງສູງສຸດ | ຍາວ×ກວ້າງ×ສູງ (ມມ) | 5000×2000×1500 |
| ຂະຫນາດໂຕະເຮັດວຽກ | ຍາວ X ກວ້າງ (ມມ) | 5000*2000 |
| ການເດີນທາງທິດທາງພື້ນຖານຂອງຫົວພະລັງງານ | ເລື່ອນໄປມາ (ມມ) | 5000 |
| ພະລັງງານຫົວຂຶ້ນແລະລົງ | ຈັງຫວະຂຶ້ນ ແລະ ລົງຂອງ ram (ມມ) | 1500 |
|
Horizontal ram type drilling power head ຫົວພະລັງງານ 1 2 | ປະລິມານ (2 pcs) | 2 |
| Spindle taper | BT50 | |
| ເສັ້ນຜ່າສູນກາງເຈາະ (ມມ) | Φ2-Φ60 | |
| ເສັ້ນຜ່າສູນກາງການປາດ (ມມ) | M3-M30 | |
| ຄວາມໄວ spindle (r/min) | 30-3000 | |
| ພະລັງງານມໍເຕີ spindle Servo (kw) | 22*2 | |
| ການເດີນທາງຊ້າຍ ແລະຂວາ (ມມ) | 600 | |
| ຄວາມຖືກຕ້ອງຂອງການຈັດຕໍາແຫນ່ງສອງທິດທາງ | 300mm*300mm | ±0.025 |
| ຄວາມຖືກຕ້ອງຂອງການຈັດຕຳແໜ່ງຊ້ຳສອງທິດທາງ | 300mm*300mm | ±0.02 |





